

Fast object three-dimensional pose estimation method based on RGBD camera
A technology of three-dimensional pose and RGB image, which is applied in computing, computer components, biological neural network models, etc., can solve the problems of poor real-time performance and time-consuming, and achieve the effects of improving efficiency, improving accuracy, and good application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The implementation of the present invention to estimate the three-dimensional pose of an object using RGBD camera information will be described in detail below with reference to the accompanying drawings.
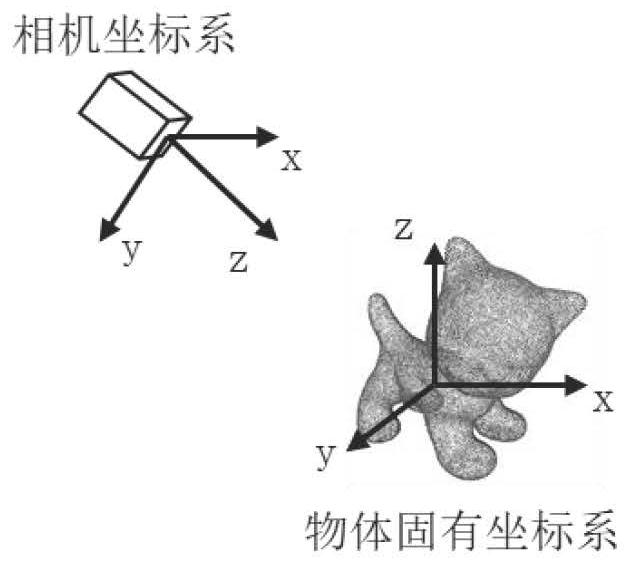
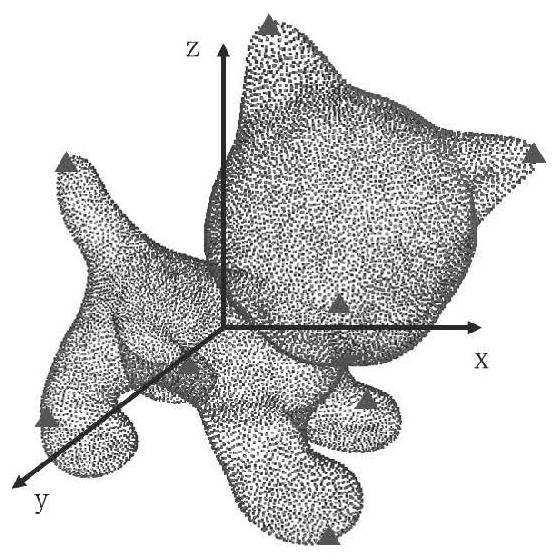
[0025] figure 1 is a schematic diagram of the 3D pose estimation problem of an object. The inherent coordinate system of the object is a common right-handed coordinate system, which is established on the object model and needs to be defined in advance before running the algorithm. The camera coordinate system is defined on the camera, with the optical center of the camera as the origin, the z-axis with the optical center facing outward as the positive direction, the x-axis and the y-axis are perpendicular to each other and parallel to the two sides of the image plane. This method estimates the object The relative transformation relationship between the intrinsic coordinate system and the camera coordinate system is T=[R|t], where R represents the rotation matrix and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More