

Eight-legged robot with bionic rigid-flexible coupling legs and control method
A rigid-flexible coupling and control method technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as high control requirements, weak carrying and moving capabilities of flexible search and rescue robots, and poor adaptability of rigid search and rescue robots.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described in detail below with reference to the accompanying drawings:
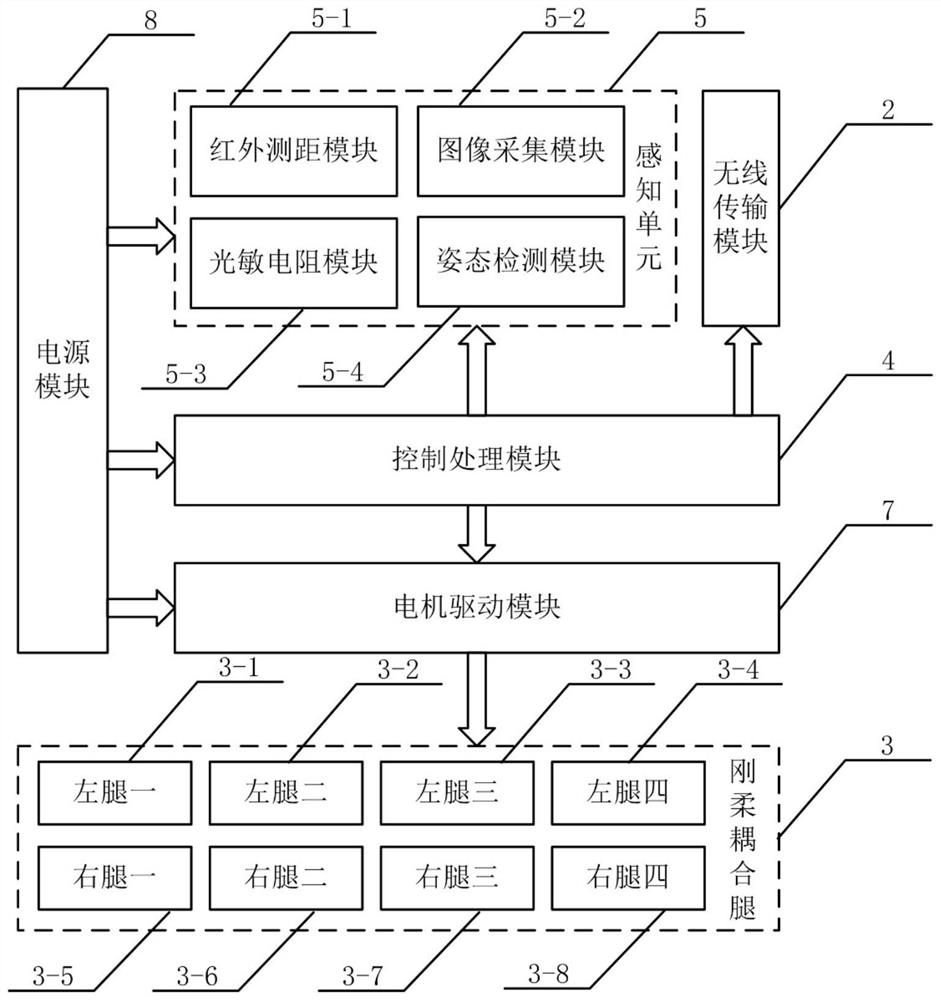
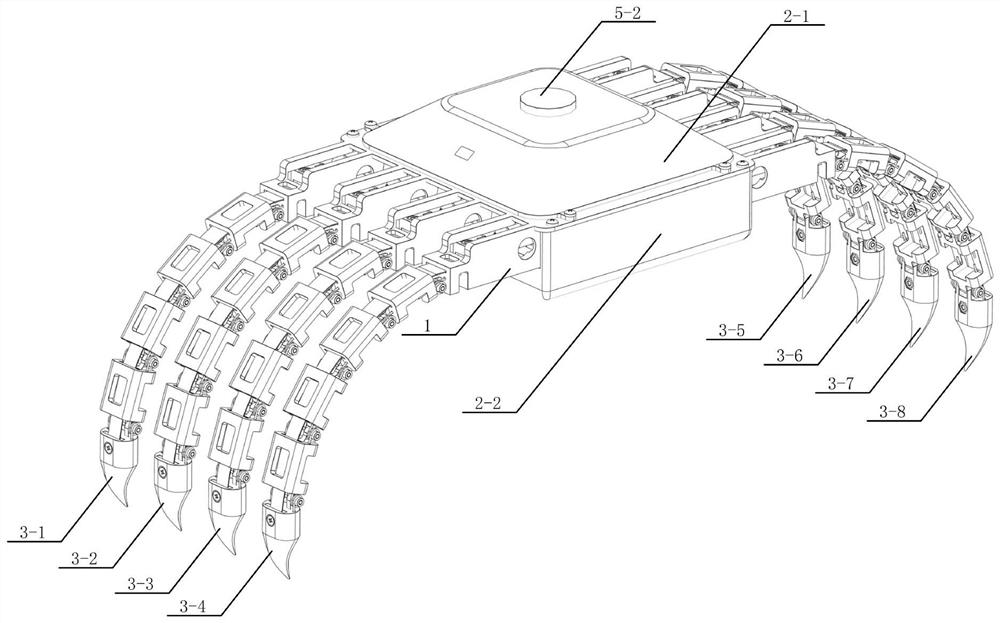
[0050] Refer to the attachment figure 1 Attach Image 6 The present invention discloses an eight-foot robot and control method having a bionic flexible coupling leg, and the eight-foot robot includes a frame 1, a housing 2, a flexible coupling leg 3, a control processing module 4, a perceptual unit 5. , Wireless transmission module 6, motor drive module 7 and power module 8;
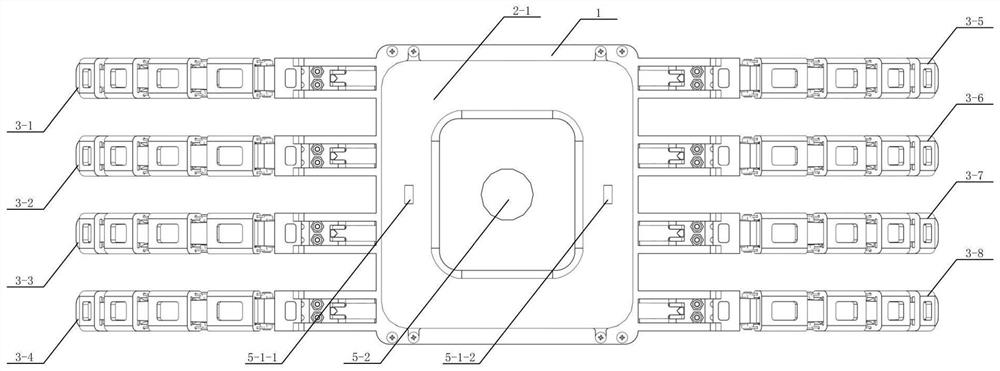
[0051] Refer to the attachment figure 1 Attachment figure 2 Attachment image 3 The frame 1 is a rectangular plate structure, and the two sides are provided with a structure mounting the rigidated coupling leg 3; the casing 2 includes an upper casing 2-1 and a lower housing 2-2, respectively. At the upper and lower portions of the rack 1; the just soft coupling leg 3 includes the left legs 3-1, the left legs, the left legs, three 3-3, left legs, four 3-4, right legs one 3 -5, left 3-7 and right...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More