

Overwater and underwater integrated unmanned system and method
A technology for underwater and unmanned ships, which is applied to underwater operation equipment, unmanned surface ships, special-purpose ships, etc. It can solve the problems of high towing cost and low positioning accuracy of deep towing systems, and improve positioning accuracy. and work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific embodiments of the present invention will be further described below with reference to the specific embodiments:
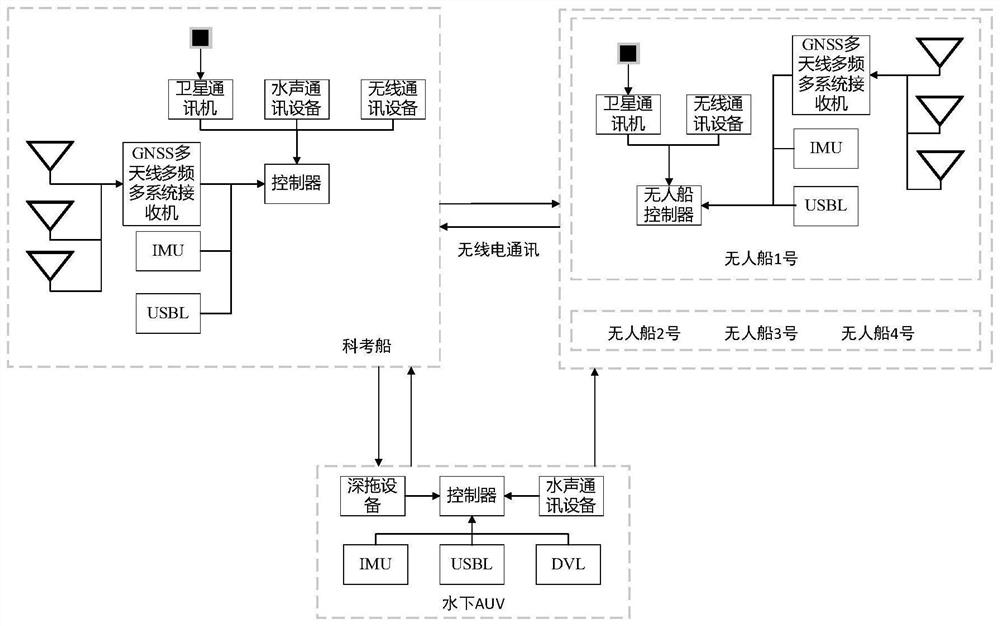
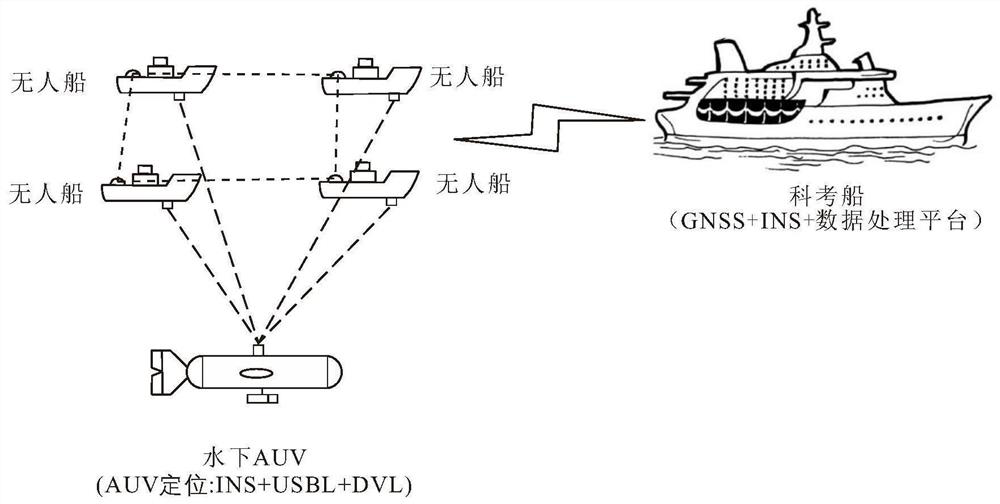
[0029] A water underwater integrated unmanned system, including unmanned ship formation, scientific ship and underwater AUV with deep-drag system, water underwater underwater integrated unmanned system, the subject of the subject, the main control base station platform, no one The boat formation is a dependent site;
[0030] Cotocho vessels and shipless ships are installed USBL, which can act as LBL use, USBL combined with water AUV installed DVL and INS equipment form underwater mixing baseline + DVL + INS positioning, speed and measurement system; AUV includes: GNSS receiver, IMU, USBL device, DVL, deep drag system, and communication devices.
[0031] Preferably, the account ship has a main control system for controlling the mobile, recycling, information release, data acquisition storage, and displays, unmanned, and unmanned boat-based team base...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More