Visual SLAM loopback verification system based on consistency cluster
A verification system and consistency technology, applied in image data processing, 3D modeling, instruments, etc., can solve problems such as insufficient reliability, wrong map estimation, wrong constraint addition, etc., to improve overall performance and high reliability , the effect of simple design method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0095] In this section, the simulation experiment of the mobile robot SLAM system is carried out to verify the improvement of the accuracy of the overall SLAM system by a visual SLAM loopback verification system based on the consistency cluster described above.
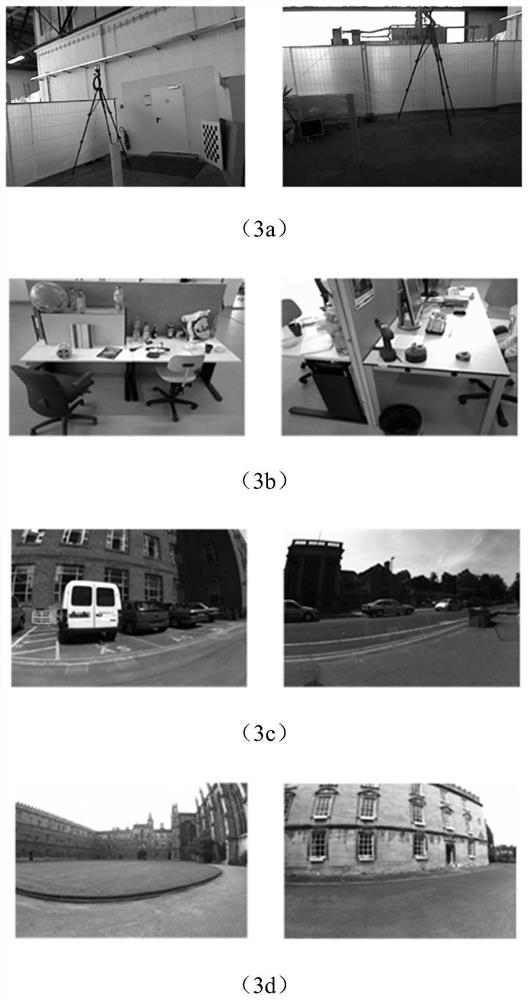
[0096] The experimental scenarios are respectively selected as the large-with-loop and long-office-household datasets, the City Center dataset, and the New College dataset in the TUM RGB-D benchmark dataset. The scenarios are as follows image 3 As shown, the algorithm results after applying the loopback verification are compared with the results without the verification algorithm, and the experimental results are analyzed. In the experiment-related parameters, the incremental range of the cluster loopback time is set to 8s, and the cluster center distance threshold is set to 15.
[0097] The performance evaluation standard of the SLAM loop detection algorithm uses the following two parameters: recall rate (recall) an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com