

Unmanned obstacle avoidance path planning method and system
A path planning and unmanned driving technology, which is applied in control/adjustment system, road network navigator, vehicle position/route/height control, etc., can solve the problem of high calculation cost, weak multi-vehicle driving control ability, and difficult to meet the real scene Application needs and other issues, to achieve the effect of high computing efficiency, convenient multi-vehicle centralized control, and fast planning and computing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
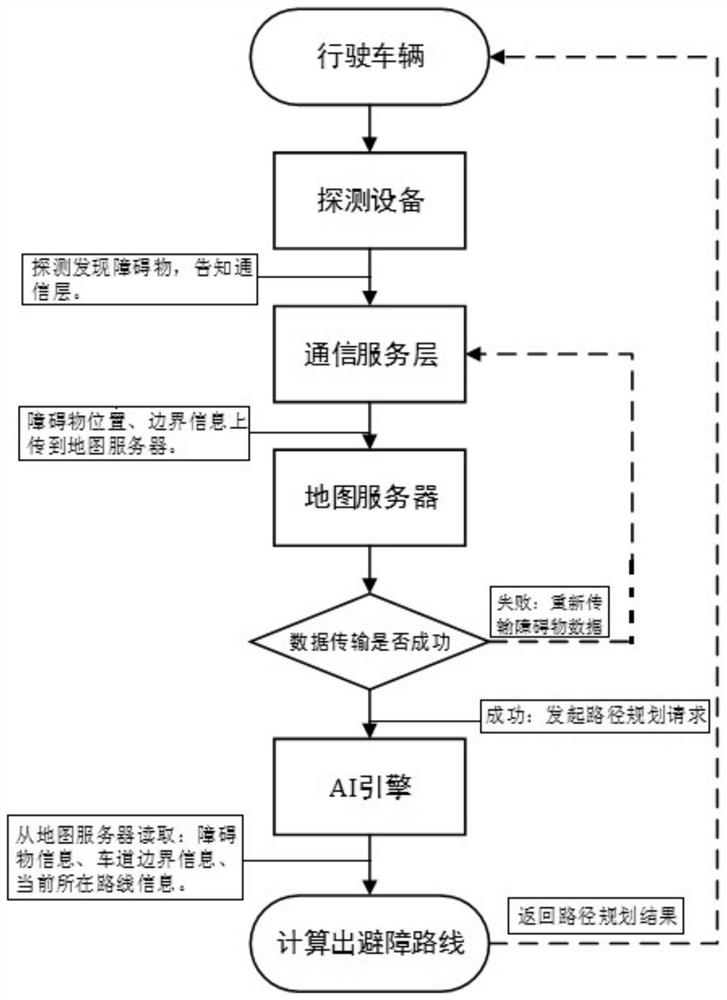
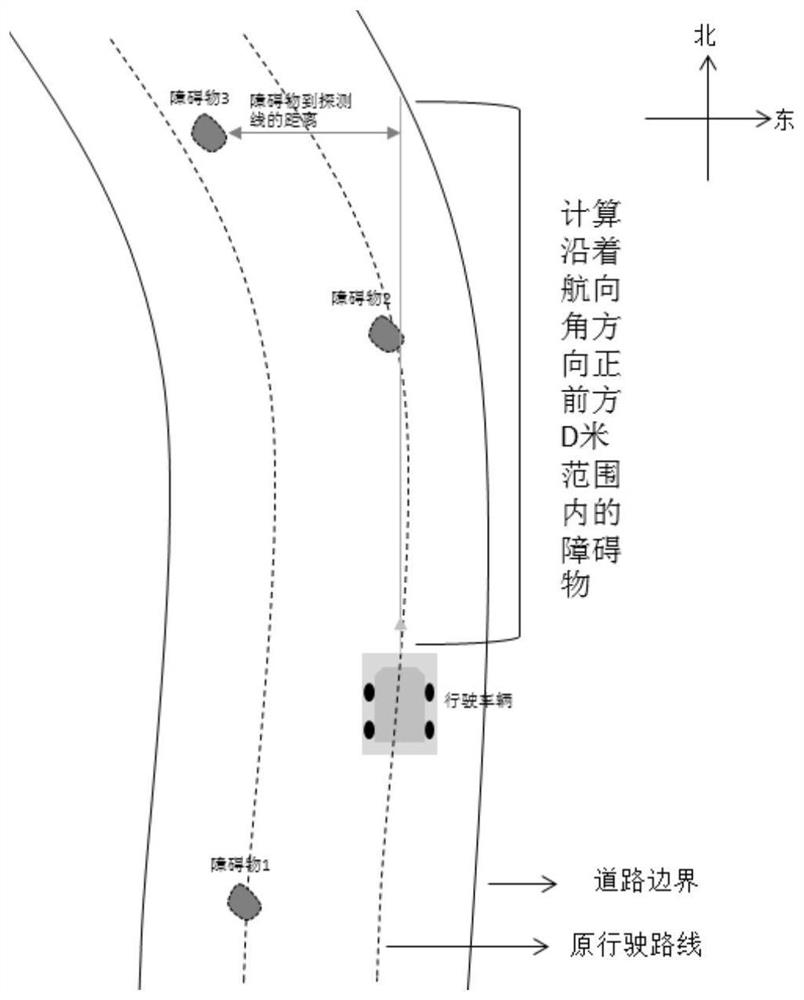
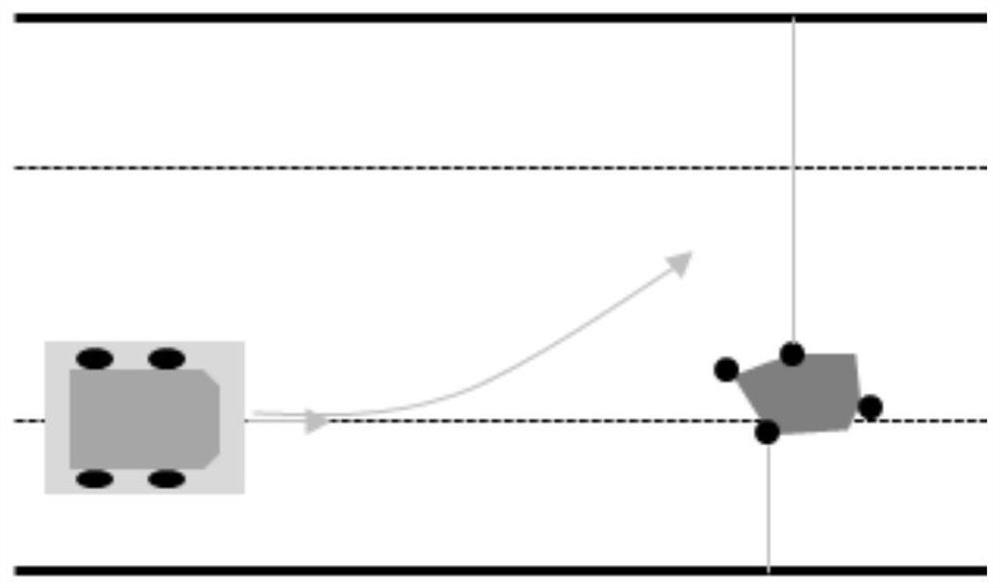
[0169] This embodiment specifically introduces a system that can realize a local path planning method for unmanned driving, which includes a driving vehicle equipped with radar detection equipment and communication equipment, a map server, and a path planning platform based on artificial intelligence (in the introduction of subsequent embodiments called the AI engine). The interactions between the various parts of the system are as figure 1 shown. The radar detection equipment detects the obstacles in front of driving in real time, and reports the location (latitude and longitude) and size (length, width and height) of the obstacle to the map server after finding the obstacle, and at the same time initiates a path planning request to the AI engine through the communication device; Read the lane data, obstacle position information, and obstacle size, and calculate a reasonable obstacle avoidance path based on the current vehicle location (latitude and longitude), and headi...
Embodiment 2
[0175] This embodiment introduces an unmanned driving obstacle avoidance path planning method that can be implemented based on the system in Embodiment 1, specifically involving the following content.
[0176] In order to make the subsequent description clearer, the basic symbols of the parameters related to the setting method are defined as follows:
[0177] VW——vehicle width; VF——the distance from the vehicle positioning point to the front of the vehicle; VB——the distance from the vehicle positioning point to the rear of the vehicle; WB——the vehicle wheelbase; δ——the maximum steering angle of the wheel; r_min— —The minimum turning radius of the vehicle, the relationship between WB and δ is σ max——The rate of curvature change allowed by the vehicle (the amount of curvature change per unit distance); sp——The starting position of the vehicle; s_yaw——The heading angle of the starting point of the vehicle; gp——The target position of the vehicle; - road width.
[0178] 1. Road...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More