Unmanned aerial vehicle complete search path planning method based on reciprocating backfill algorithm
A technology of searching path and backfilling algorithm, applied in the field of radar, it can solve the problems of limited battery capacity, easy to fall into dead zone, many times of U-turn, etc., to achieve the effect of low repetition rate, reduce resource consumption, and reduce the number of U-turns
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
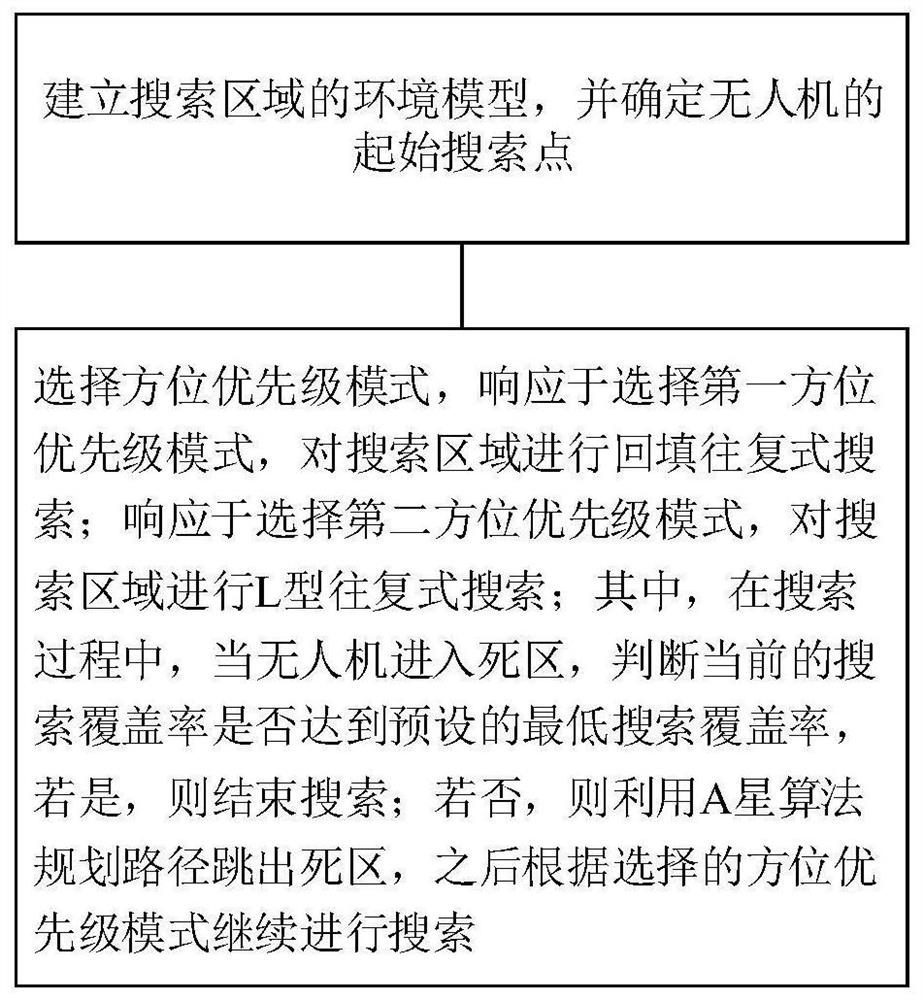
[0056] See figure 1 , figure 1 It is a flow diagram of a method for planning a complete search path for a UAV based on a reciprocating backfill algorithm provided by an embodiment of the present invention. As shown in the figure, the method for planning a complete search path for a UAV based on a reciprocating backfill algorithm in this embodiment includes :
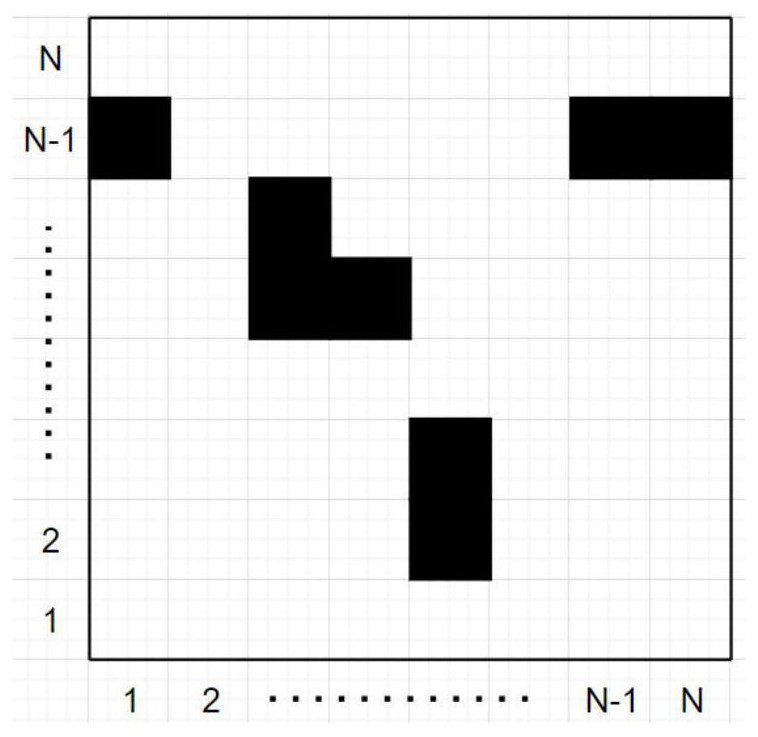
[0057] Establish an environmental model of the search area and determine the starting search point for the UAV;
[0058] Select orientation priority mode,
[0059] performing a backfill reciprocating search of the search area in response to selecting the first orientation priority mode;
[0060] performing an L-shaped reciprocating search of the search area in response to selecting the second orientation priority mode;
[0061] Among them, during the search process, when the UAV enters the dead zone, it is judged whether the current search coverage reaches the preset minimum search coverage, and if so, the search is ...
Embodiment 2
[0111] In this embodiment, the effects of the UAV complete search path planning method based on the reciprocating backfill algorithm in Embodiment 1 are specifically described through simulation experiments.
[0112] (1) Simulation conditions:
[0113] The simulation operating system is Intel(R) Core(TM) i7-8750 CPU@2.2GHz, 64-bit Windows 10 operating system, and the simulation software uses MATLAB(R2020b).
[0114] (2) Simulation content and result analysis:
[0115] Table 1
[0116]
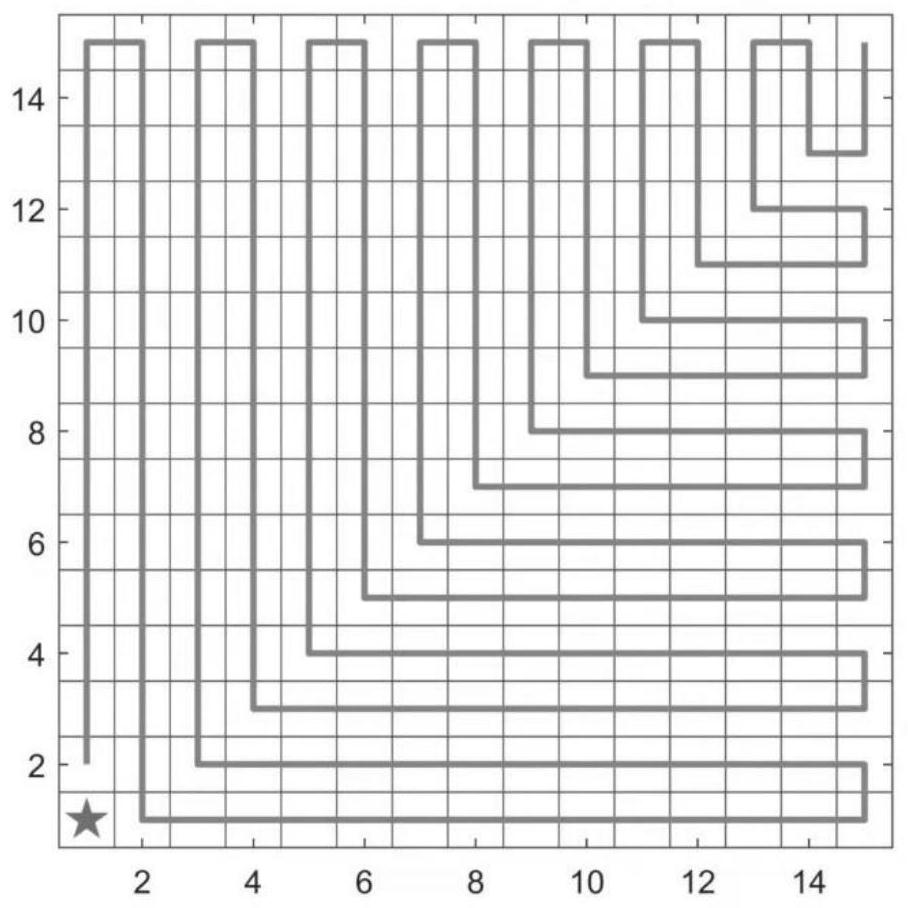
[0117] See Figure 7 and Figure 8 , Figure 7 It is a simulation result diagram of the backfill reciprocating search provided by the embodiment of the present invention; Figure 8 It is a simulation result diagram of the L-shaped reciprocating search provided by the embodiment of the present invention. They are all schematic diagrams of path planning under 30 random obstacles. The thick light gray line in the figure represents the route planned by the A-star algorithm, and the × sign ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com