

Stretchable arm holding barrel feeding mechanism control method and device, equipment and sanitation vehicle
A control method and telescopic arm technology, which is applied to the control of the telescopic arm bucket loading mechanism and the field of sanitation vehicles, can solve the problems of long bucket loading operation time and prone to inclined material leakage, etc. The effect of avoiding environmental pollution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present application will be described in detail below with reference to the accompanying drawings and embodiments.
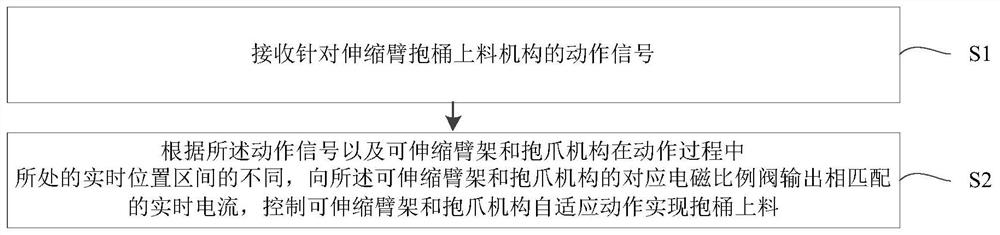
[0071] refer to figure 1 , the preferred embodiment of the present application provides a method for controlling the feeding mechanism of the telescopic arm bucket, comprising the steps of:
[0072] S1. Receive the action signal for the telescopic arm bucket loading mechanism;
[0073] S2. According to the difference between the action signal and the real-time position intervals of the telescopic luffing jib and the claw mechanism during the action, output the phase to the corresponding proportional valves of the telescopic luffing boom and the claw mechanism The matched real-time current controls the self-adaptive action of the telescopic luffing boom and the gripper mechanism to realiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More