

Laser point cloud scene similarity evaluation method
A similarity evaluation and laser point cloud technology, applied in the field of computer vision, to achieve accurate evaluation results, precise capture, and improve coding efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention, and the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
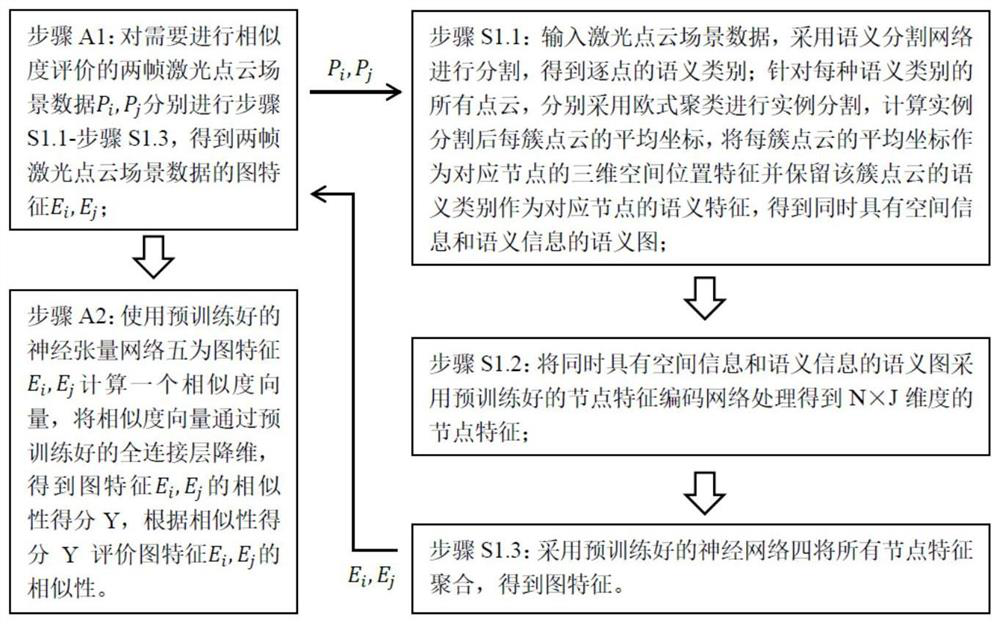
[0092] A laser point cloud scene similarity evaluation method, comprising the following steps:
[0093] Step A1: Two frames of laser point cloud scene data P that need to be evaluated for similarity i ,P j Perform step S1.1-step S1.3 respectively to obtain the graph feature E of two frames of laser point cloud scene data i ,E j ; In the actual application of the robot, the current scene and a certain frame in the historical scene are generally used a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More