

Robot electronic skin based on capacitance and friction power generation principle and preparation method thereof
A technology for triboelectric power generation and electronic skin, which can be used in triboelectric generators, instruments, measuring devices, etc., and can solve the problems of difficult application, high cost, and easy damage.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to enable those skilled in the art to better understand that the technical solutions of the present invention can be implemented, the present invention will be further described below in conjunction with specific examples and accompanying drawings, but the given examples are not intended to limit the present invention.
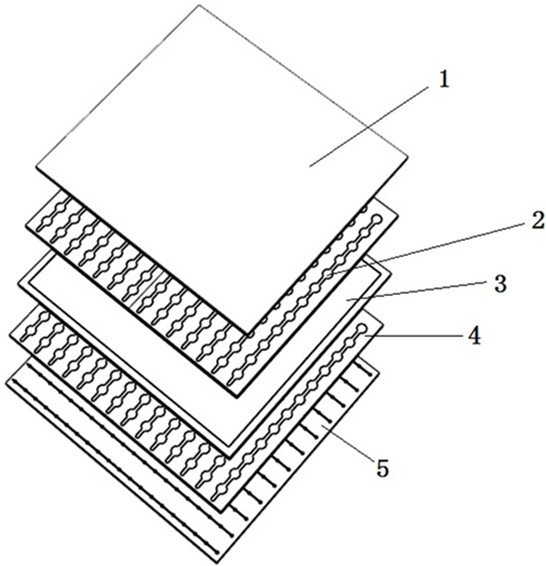
[0039] Such as figure 1 As shown, a robotic electronic skin based on the principle of capacitance and triboelectric power generation is mainly composed of a flexible sandpaper modified layer 1, an upper base layer 2, an upper electrode layer 3, a lower base layer 4, and a lower electrode layer 5. Assembled structure, the area of the upper electrode layer is larger than the area of the lower electrode layer;
[0040] The upper base layer and the lower base layer of the electronic skin are flexible and stretchable materials;
[0041] The upper electrode layer and the lower electrode layer adopt liquid gallium indium tin alloy;
[0042] When...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More