

Aircraft fuselage detection robot
An aircraft fuselage and robot technology, applied in the field of detection, can solve problems such as affecting the analysis effect of the analytical head data, difficult to guarantee the movement route, etc., to achieve the effect of enhancing the fluency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
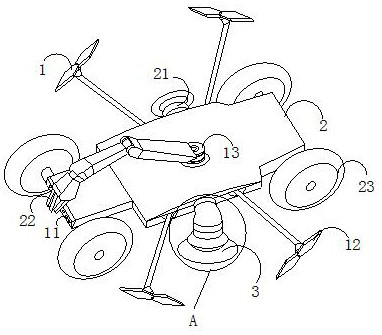
[0026] Such as Figure 1-Figure 2 As shown, the present invention provides a kind of aircraft fuselage inspection robot, and its structure comprises multi-rotor UAV 1, sucker type wall-climbing robot 2, flexible transmission device 3, analysis mat 4, and described multi-rotor UAV 1 is installed There is a suction cup type wall-climbing robot 2, and the suction cup type wall-climbing robot 2 is provided with a flexible transmission device 3. The multi-rotor UAV 1 includes a camera 11, a propeller 12, a drive shaft 13, and the camera 11 and the rotary The paddle 12 is electrically connected through the drive shaft 13 to cooperate with non-contact non-destructive testing at low altitude and short distance. 21 is indirectly matched with the flexible transmission device 3 through the main board and the wheel 23. The main board and the wheel 23 are hingedly connected to the driving shaft 13, and act on the adsorption to the tested body to fix the detection robot. The flexible transm...
Embodiment 2
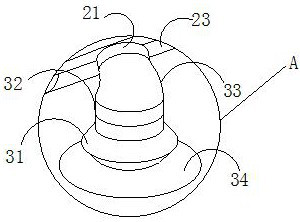
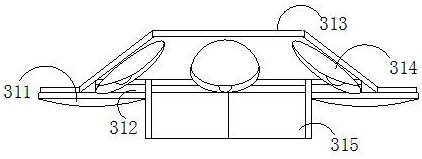
[0028] Such as Figure 3-Figure 5 As shown, on the basis of Embodiment 1, the present invention combines the mutual cooperation of the following structural components. The booster body 31 includes a top bag 311, a connecting rod 312, a vertical cone 313, a deviation correction member 314, and a control body 315. The top bag 311 is fixedly connected to the connecting rod 312, and transitionally fits with the outer side of the contact probe ring 34. The connecting rod 312 is welded and connected under the vertical cone 313, and the vertical cone 313 is provided with more than three deviation correcting parts 314, the deviation correction member 314 is matched with the internal clearance of the contact probe ring 34 through the control body 315, and the deviation correction member 314 includes a pointing track 141, a push handle 142, a twisting cloth 143, a ball 144, and a chuck 145. The pointing track 141 is fixedly connected on the twisting cloth 143, and is hingedly connected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More