

Method and device for real-time control of joints of parallel biped robot
A biped robot, real-time control technology, applied in the field of robotics, can solve problems such as the influence of real-time robot control, difficulties in real-time calculation of parallel joint angles, large motor inertia, etc., and achieve the effect of stable and reliable joint data calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] The following combination Figure 1-Figure 6 The present invention is further described.
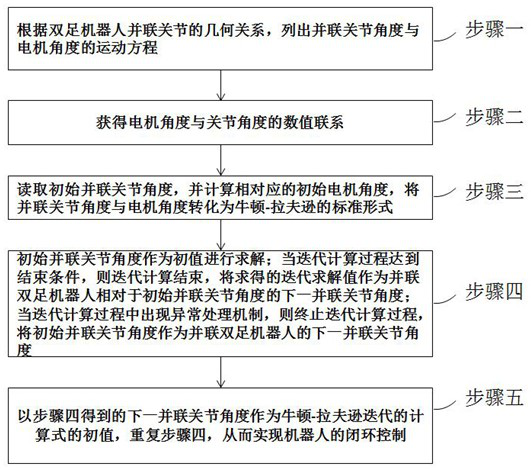
[0040] A method for real-time control of joints of a parallel biped robot, comprising the following steps:
[0041] Step 1: According to the geometric relationship of the parallel joints of the biped robot, list the motion equations of the parallel joint angles and motor angles;
[0042] Described step one is specifically:
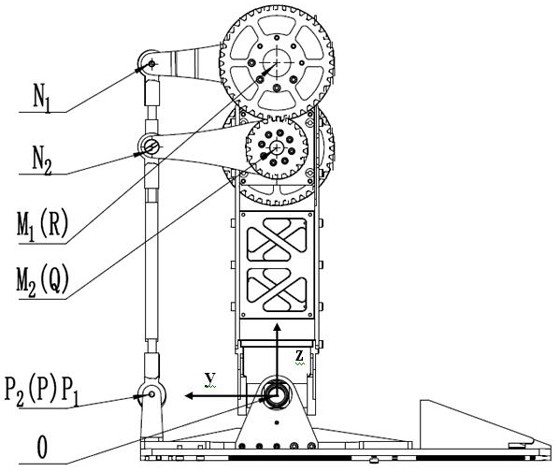
[0043] The parallel joint of the biped robot includes a first kinematic chain M that jointly drives the roll angle and pitch angle rotation of the foot of the biped robot. 1 N 1 P 1 O and the second kinematic chain M 2 N 2 P 2 O, the first kinematic chain M1 N 1 P 1 O comprises a first horizontal bar and a first vertical bar, the second kinematic chain M 2 N 2 P 2 O includes the second horizontal bar and the second vertical bar; the middle point N 1 is the hinge point of the first horizontal bar and the first vertical bar, point N 2 is the hinge ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More