

Tracking and obstacle avoidance patrol car path planning algorithm based on multiple sensors
A multi-sensor, path planning technology, applied in the field of patrol car tracking, can solve the problems of mobile robot error, inability to determine external interference, difficult to determine the mathematical model of mobile robot, etc., to achieve the effect of enhancing stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
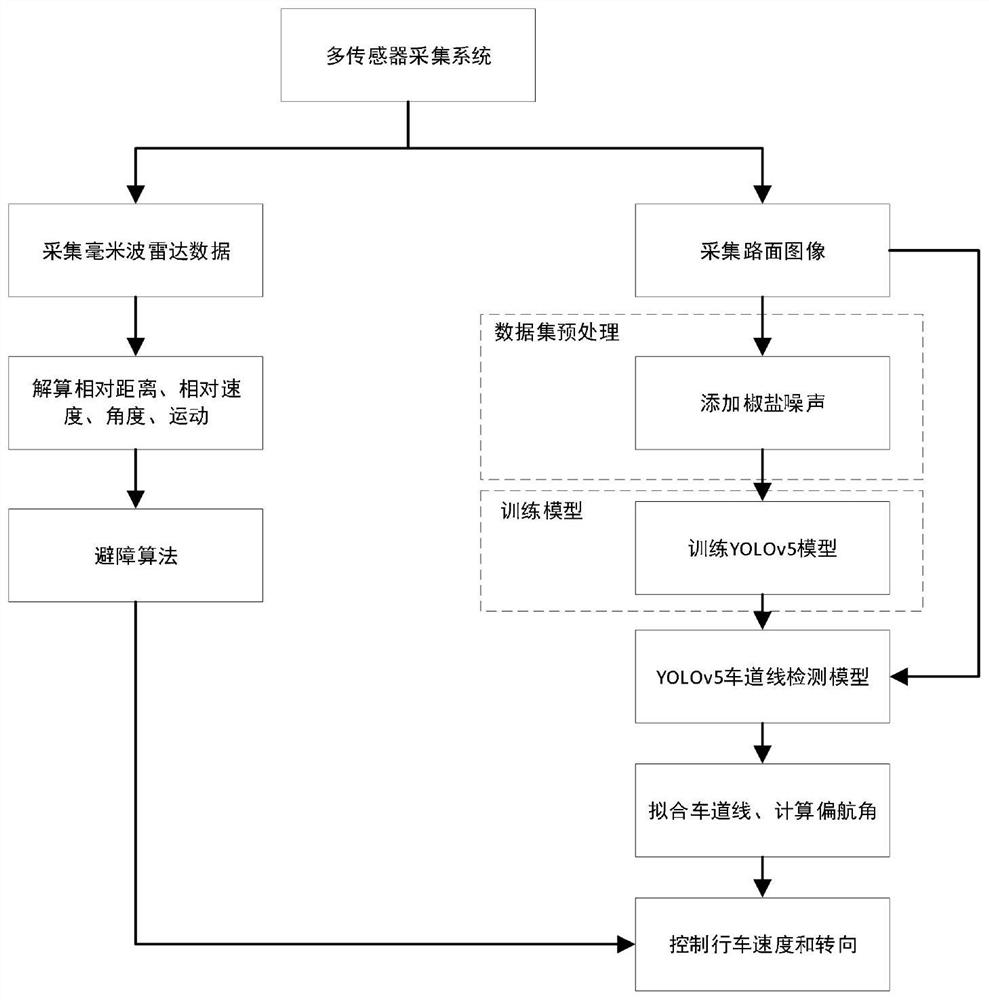
[0039] The present invention proposes a patrol car path planning algorithm based on multi-sensor tracking and obstacle avoidance. Salt and pepper noise is added to simulate the harsh environment when driving, and the obstacle avoidance function of the patrol car is realized according to the millimeter wave radar data. figure 1 It is a flowchart of the present invention. The steps of the present invention will be described in detail below in conjunction with the flowchart.
[0040] Step 1, use multi-sensors to collect patrol car operation data: collect road driving images through high-definition fisheye cameras, and accurately obtain physical environment information around the car through millimeter-wave radar, including the relative distance and relative speed between the patrol car and other objects , angle, direction of motion, etc.;
[004...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More