

Magnetic adsorption wall-climbing spraying robot with curved surface adaptive capacity and use method thereof
A technology for spraying robots and adaptability, which is used in motor vehicles, spraying devices, transportation and packaging, etc., can solve the problems of lack of shock absorption and obstacle-surmounting capabilities, low operating efficiency of wall-climbing robots, and lack of adaptability. Light weight, anti-slip, and stable adsorption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further illustrated below in conjunction with the accompanying drawings and specific embodiments, and it should be understood that these embodiments are only for illustrating the present invention and are not intended to limit the scope of the present invention.
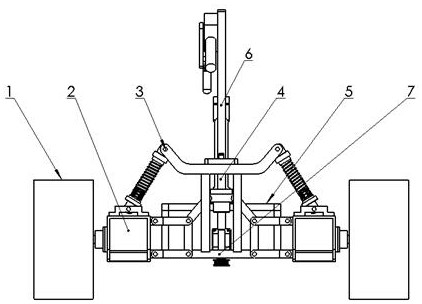
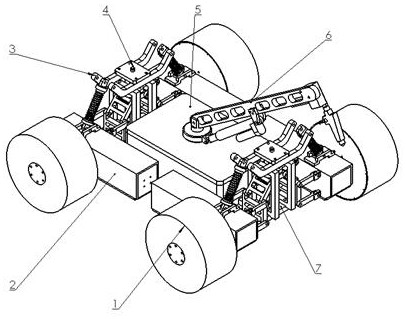
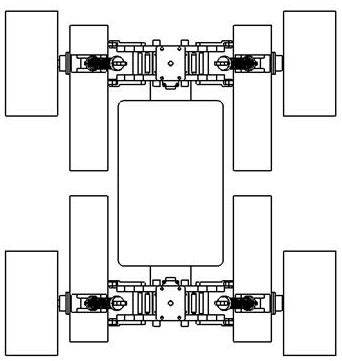
[0031] A magnetic adsorption wall-climbing spraying robot with the ability to adapt to curved surfaces, such as Figure 1~6 As shown, including the main body 7, independent spring suspension structure 3, lifting screw 4, magnetic adsorption wheel 1, motor fixing device 2, spraying mechanical arm 6, control box cover 5, the four wheel positions of the main body 7 are respectively installed A motor fixing device 2 with a built-in motor, the magnetic adsorption wheel 1 is installed on the motor fixing device 2, the control box cover 5 is located in the middle of the main body 7, the spraying mechanical arm 6 is movably installed on the control box cover 5, a pair of magnetic An eleva...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More