Urban monocular mapping method and system based on GPS constraint and dynamic correction
A dynamic correction and visual map technology, applied in the field of urban monocular map methods and systems, can solve problems such as difficult and stable acquisition, and achieve the effects of reducing dependence, increasing reliability, and reducing requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
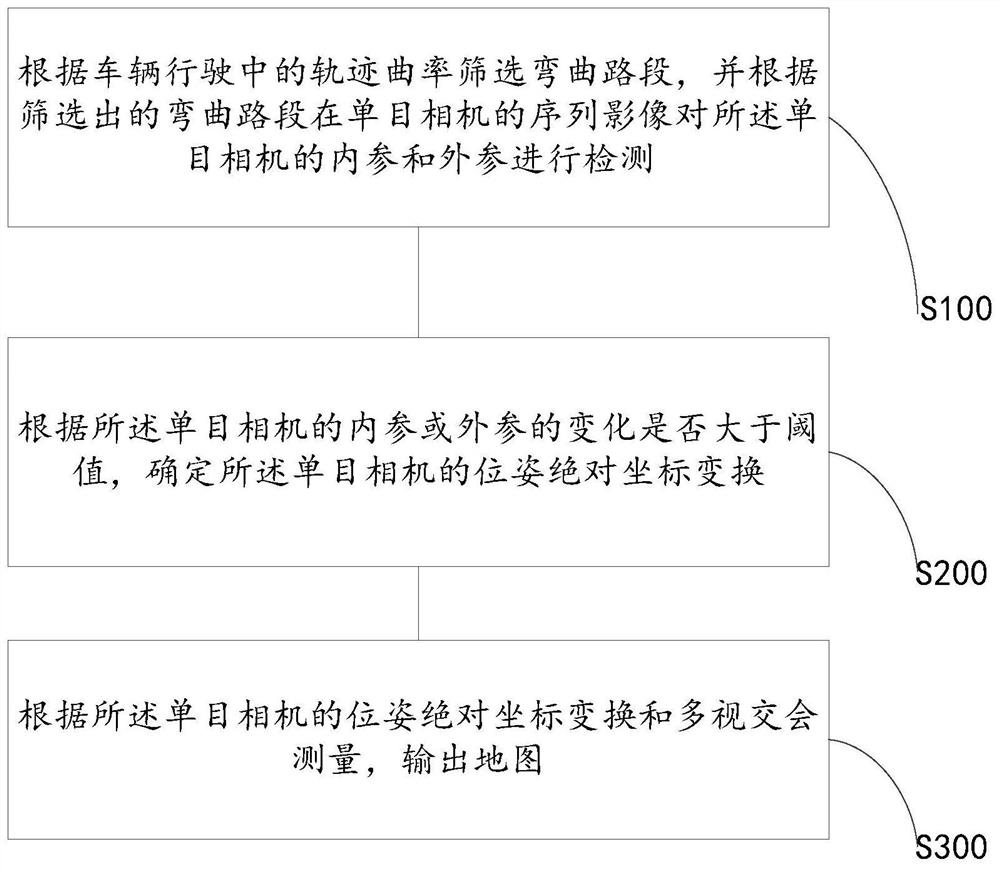
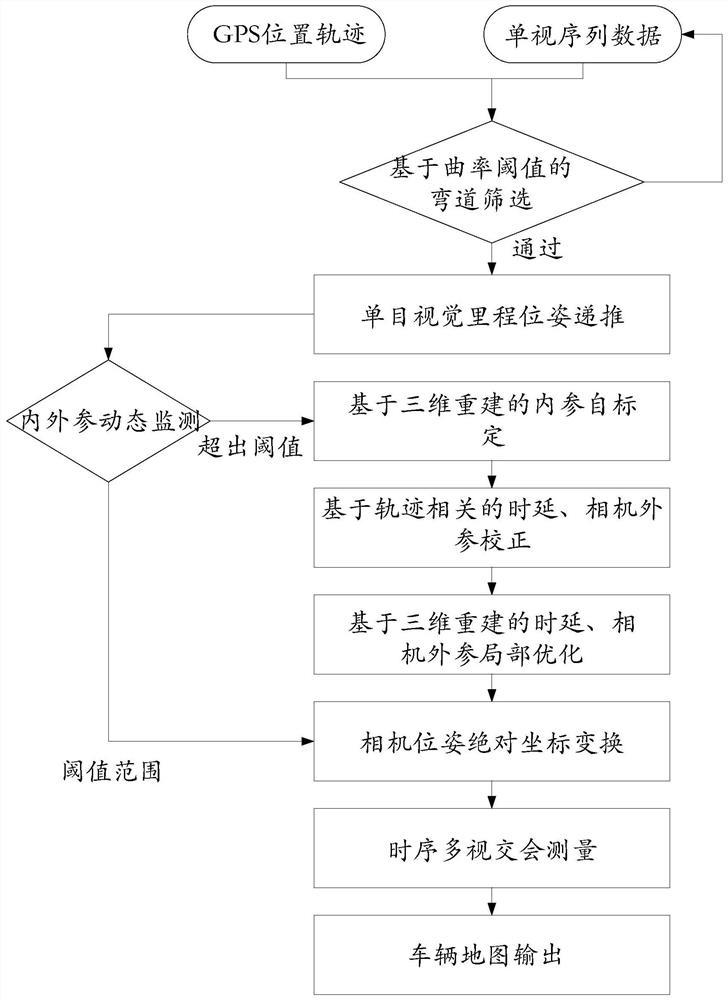
[0030] refer to figure 1 and image 3, in the first aspect of the present invention, a method for monocular mapping of urban areas based on GPS constraints and dynamic corrections is provided, including: S100. Screening curved road sections according to the curvature of the vehicle's trajectory, and according to the screened curved road sections in the monocular The sequence image of the camera detects the internal reference and external reference of the monocular camera; S200. According to whether the change of the internal reference or external reference of the monocular camera is greater than a threshold, determine the absolute coordinate transformation of the pose of the monocular camera; S300. Output a map according to the absolute coordinate transformation of the monocular camera's pose and the intersecting measurement.
[0031] It can be understood that the internal reference or external reference in the present invention usually exists in the form of a tuple or a mat...
Embodiment 2
[0052] refer to Figure 4 , the second aspect of the present invention provides an urban monocular mapping system 1 based on GPS constraints and dynamic correction, including a detection module 11, a determination module 12 and an output module 13, the detection module 11 is used to The trajectory curvature in the filter screens the curved road section, and detects the internal reference and external reference of the monocular camera according to the sequence image of the screened curved road section in the monocular camera;
[0053] The determination module 12 is used to determine the absolute coordinate transformation of the monocular camera's pose according to whether the change of the internal or external parameters of the monocular camera is greater than a threshold; the output module 13 is used to determine the absolute coordinate transformation of the monocular camera according to the The absolute coordinate transformation of the camera's pose and multi-view intersectio...
Embodiment 3
[0057] A third aspect of the present invention provides an electronic device, including: one or more processors; a storage device for storing one or more programs, when the one or more programs are used by the one or more The processor executes, so that the one or more processors implement the urban monocular mapping method based on GPS constraints and dynamic correction provided by the first aspect of the present invention.
[0058] refer to Figure 5 , the urban monocular mapping device 500 based on GPS constraints and dynamic correction may include a processing device (such as a central processing unit, a graphics processing unit, etc.) 508 programs loaded into random access memory (RAM) 503 to execute various appropriate actions and processes. In the RAM 503, various programs and data necessary for the operation of the electronic device 500 are also stored. The processing device 501 , ROM 502 and RAM 503 are connected to each other through a bus 504 . An input / output (I...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More