

Real-time route planning method based on decision tree
A route planning and decision tree technology, applied in navigation calculation tools, special data processing applications, design optimization/simulation, etc., can solve problems such as uncertainty in dangerous areas, complex low-altitude environments, and insufficient planning flexibility, and reduce detours. , strong flexibility, strong security effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further elaborated and described below in combination with specific embodiments. The technical features of the various implementations in the present invention can be combined accordingly on the premise that there is no conflict with each other.
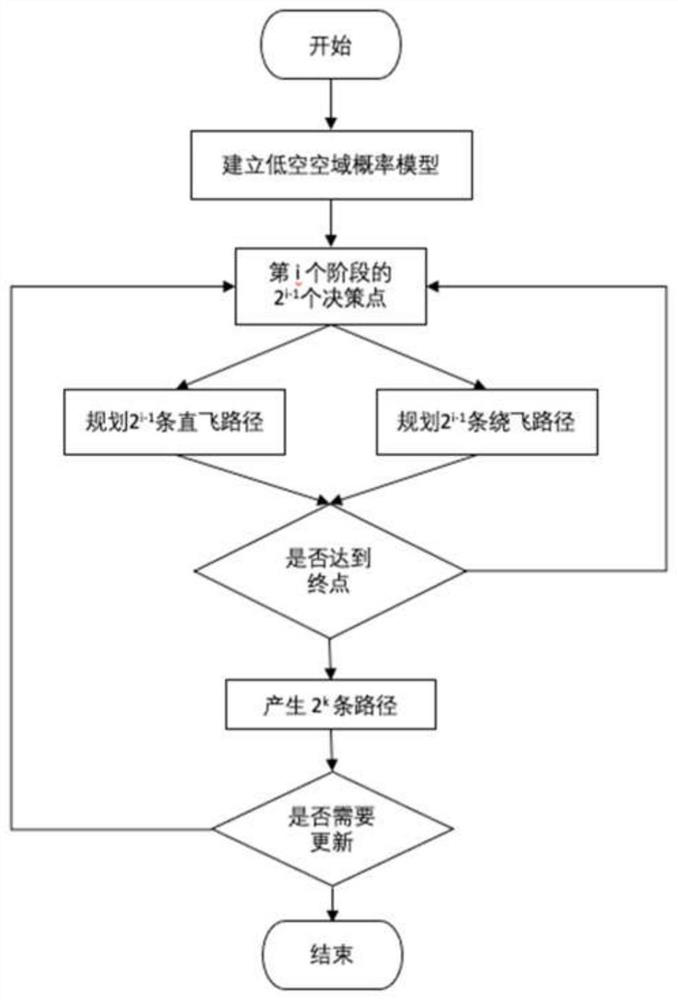
[0036] Such as figure 1 Shown, a kind of real-time route planning method based on decision tree provided by the present invention, it comprises the following steps:
[0037] Step 1: Establish a low-altitude airspace probability model, and the dangerous areas in the model include no-fly zones and high-risk areas. No-fly zones include terrain obstacles, control areas, etc.; high-risk areas are mainly severe weather areas in weather forecasts. The three-dimensional airspace is represented by a two-dimensional grid model for path planning in the horizontal direction. Each grid is a rectangle with a certain length and width. Each grid point is assigned a value between 0 and 1, indicating The cost va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More