

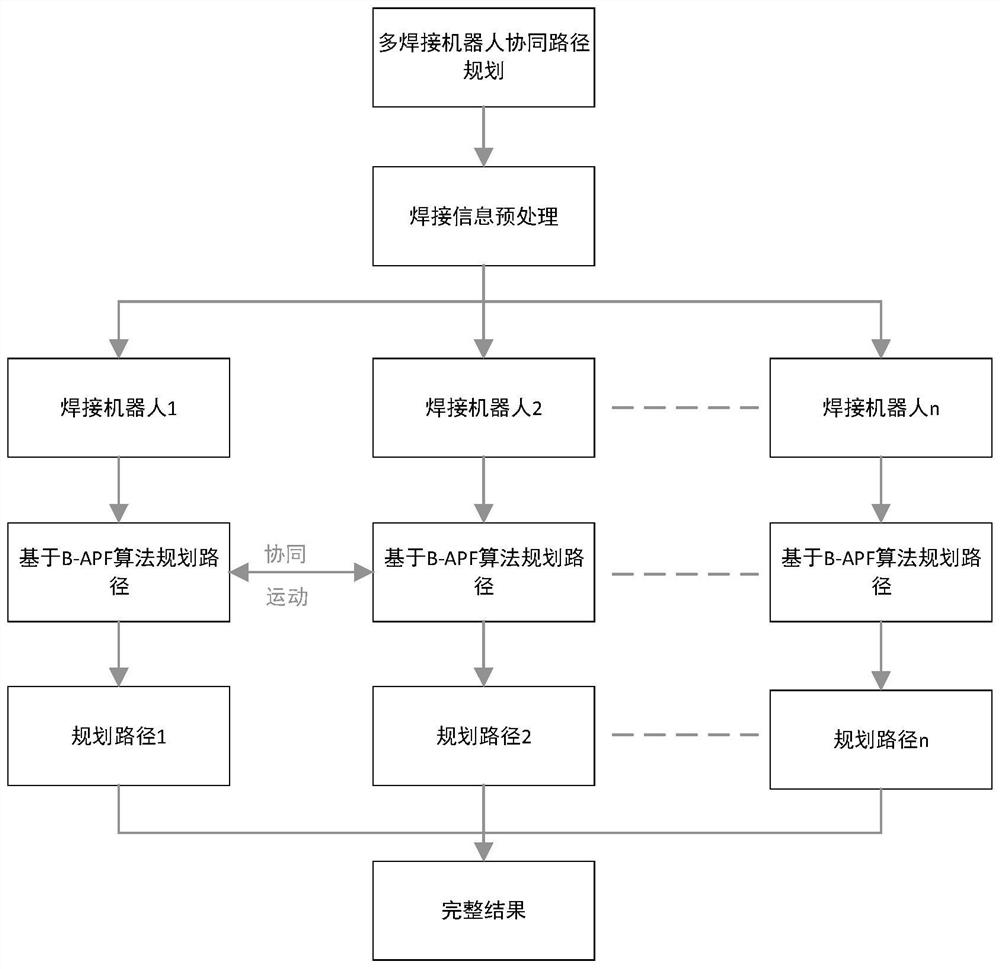
Multi-welding robot path optimization method and system based on B-APF
A technology of welding robot and B-APF, which is applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of local minimum and poor synergistic effect, achieve enhanced information interaction and collaboration capabilities, and improve Local optimization ability and the effect of improving the overall path planning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] In order to make the purpose, technical solution and advantages of the present application clearer, the present application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present application, and are not intended to limit the present application.
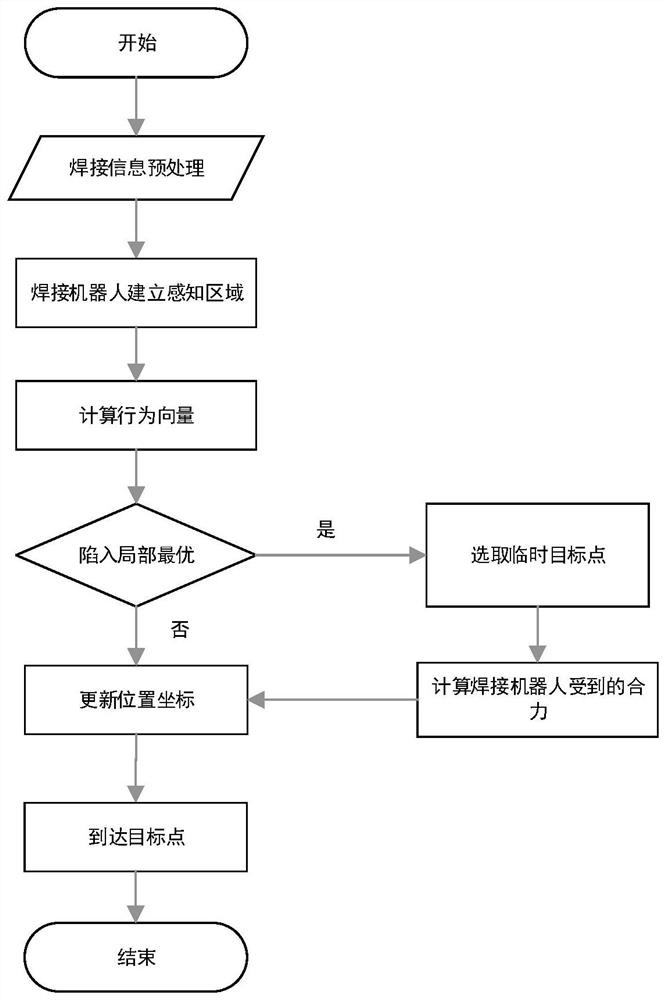
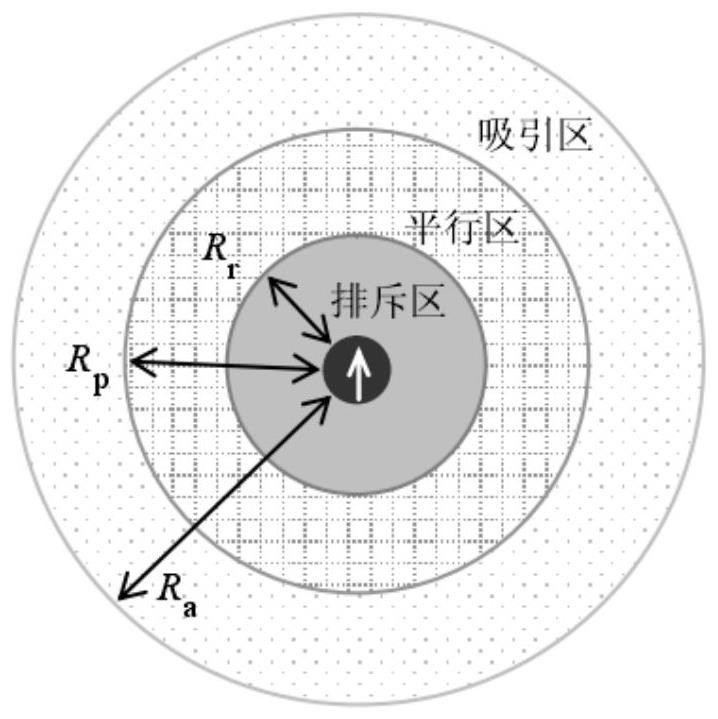
[0066] Aiming at how to obtain the optimal multi-welding robot cooperative working path, the present invention proposes an artificial potential field optimization algorithm based on BOID rules. Artificial potential field method path planning is a virtual force method proposed by Khatib. Its basic idea is to design the movement of the robot in the surrounding environment as an abstract movement in the artificial gravitational field. Gravity", the obstacle produces a "repulsion" to the mobile robot, and finally the movement of the mobile robot is controlled by seeking the re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More