Novel laying and recovery system and method for unmanned underwater vehicle
A recovery system and submarine technology, applied to unmanned surface ships, control/adjustment systems, instruments, etc., can solve the problems of difficult docking methods, increased recovery difficulty, and high requirements, so as to improve safety and stability, and improve Sensitivity and accuracy, weight reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
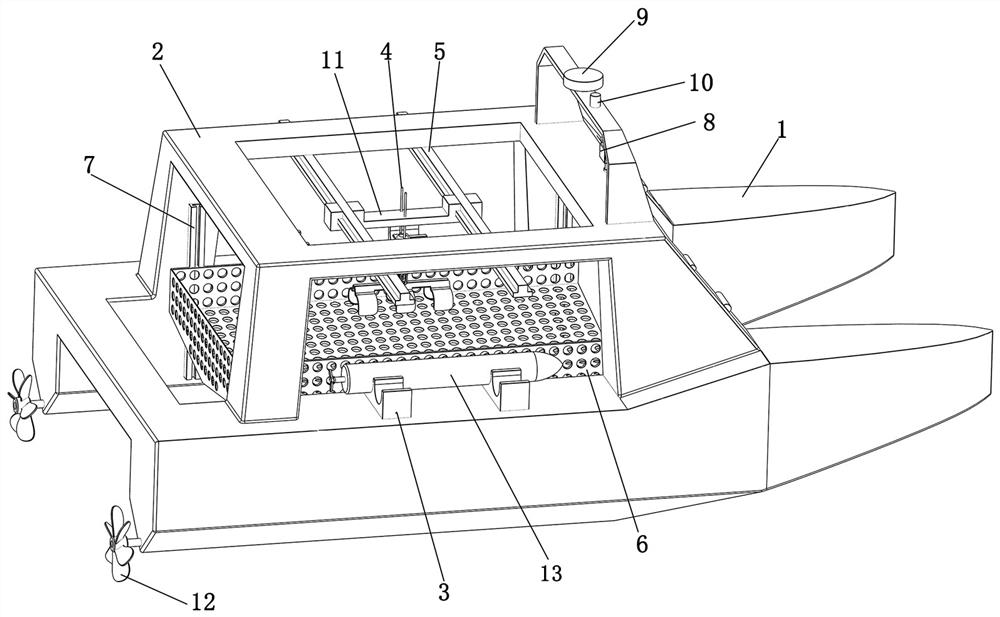
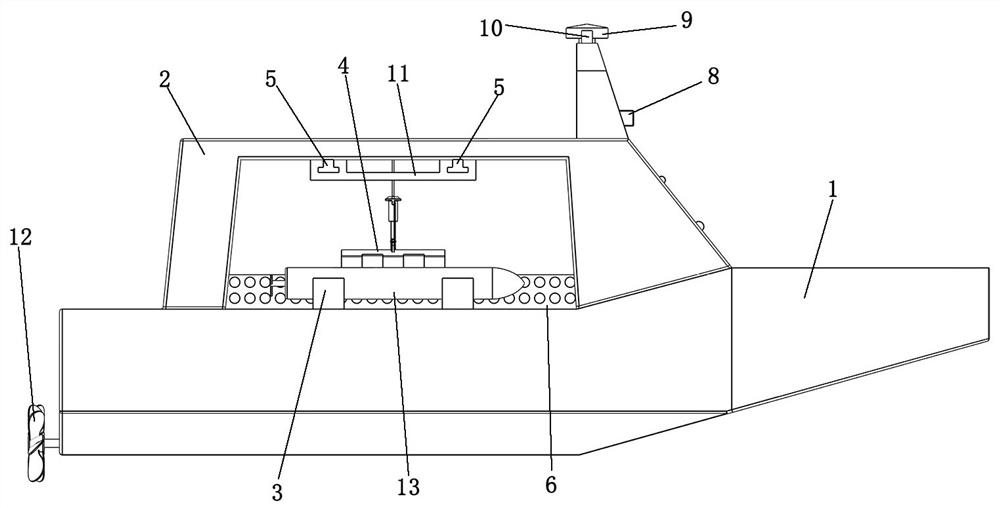
[0059] A deployment and recovery system for a new type of unmanned underwater vehicle, its structure is as follows: Figure 1-Figure 16 As shown, including the ship-borne platform, the ship-borne platform is provided with a deployment and recovery platform, and the deployment and recovery platform cooperates with the intelligent control platform set on the ship-borne platform; the ship-borne platform includes a catamaran cabin 1, a catamaran cabin 1 A power structure is provided inside, and the power structure includes propeller propellers 12 respectively arranged at the stern of the catamaran cabin 1 and gyro stabilizers respectively arranged in the catamaran cabin 1; multiple gaps are arranged on the deck of the catamaran cabin 1 The matched deck base 3 is provided with a submersible 13 matched with the deck base 3 on the deck base 3 .
[0060] The deployment and recovery platform includes a frame structure 2 arranged on the catamaran cabin 1. The frame structure 2 is provid...
Embodiment 2
[0085] A method for deploying and recovering a novel unmanned submersible vehicle differs from Embodiment 1 in that the deployment operation of the submersible vehicle 13 can be performed automatically, and the specific steps are as follows:
[0086] S1. The deployment and recovery personnel issue a deployment task command through the remote controller, and the communication module 10 receives the deployment task command. The deployment and recovery controller of the catamaran cabin 1 performs route planning according to the received command, and the navigation on the frame structure 2 The positioning module 9 performs navigation and positioning on the planned route, the environmental perception module 8 detects the surrounding environment of the catamaran cabin 1 in real time, and the deployment and recovery controller controls the shipboard platform carrying the submersible 13 to pass through the propeller propeller 12 according to the order information such as the route. Nav...
Embodiment 3
[0095] A method for deploying and recovering a novel unmanned submersible vehicle differs from Embodiment 1 in that the recovery operation of the submersible vehicle 13 can be performed automatically, and the specific steps are as follows:
[0096] T1. Deployment and recovery personnel send a recovery task command through the remote controller, and the communication module 10 receives the recovery task command. The deployment and recovery controller of the catamaran cabin 1 performs route planning according to the received order, and the deployment and recovery controller is based on the route, etc. The command information controls the ship-borne platform to sail to the designated target water area to be on standby, the navigation and positioning module 9 performs navigation and positioning on the planned route, and the environmental perception module 8 performs real-time detection of the surrounding environment of the catamaran cabin 1; and obtains the location of the submersib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com