Input current fault detection method for autonomous underwater robot control system
An underwater robot and control system technology, applied in general control systems, control/regulation systems, adaptive control and other directions, can solve problems such as high requirements for fault signal selection, unsatisfactory effects, and slow analysis of high-frequency noise. , to achieve the effect of facilitating fault detection and identification
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
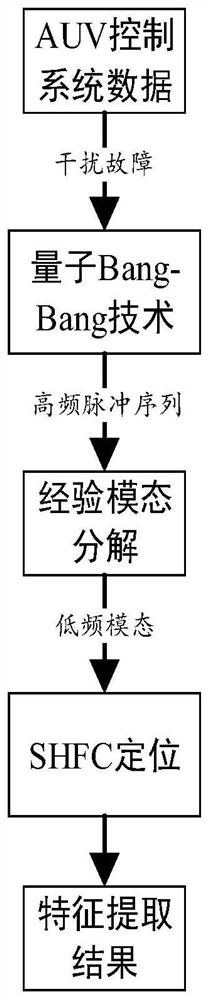
[0043] Such as figure 1 As shown, an autonomous underwater robot control system input current fault detection method includes the following steps:
[0044] (1) The quantum Bang-Bang technology is used to decouple the interference and fault decoupling of the collected signals of the AUV control system, so that the interference signal and the fault signal evolve independently.
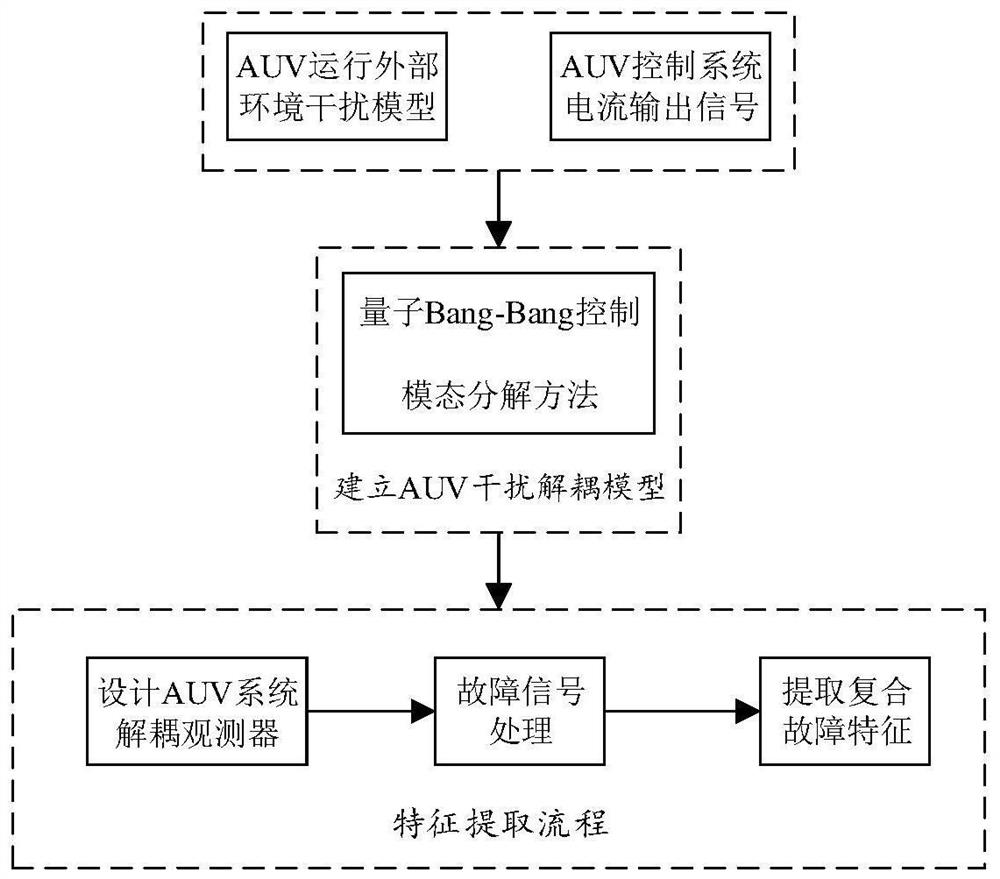
[0045] (1.1) If figure 2 As shown, using quantum Bang-Bang technology to decouple the interference and fault characteristics of the collected AUV control system signals, establish multiple system models with faults and interference, and synthesize quantum state models. According to the probability of occurrence of faults and interference Construct quantum spin states.
[0046] (1.2) The key to quantum Bang-Bang control depends on the switch surface, and the positive ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com