

Unmanned loading system
A vehicle and on-site technology, applied in the field of unmanned loading system, can solve problems such as high labor intensity, harmful to human body, unsafe, etc., and achieve the effect of reducing accidents, avoiding safety accidents, and accurate and effective positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
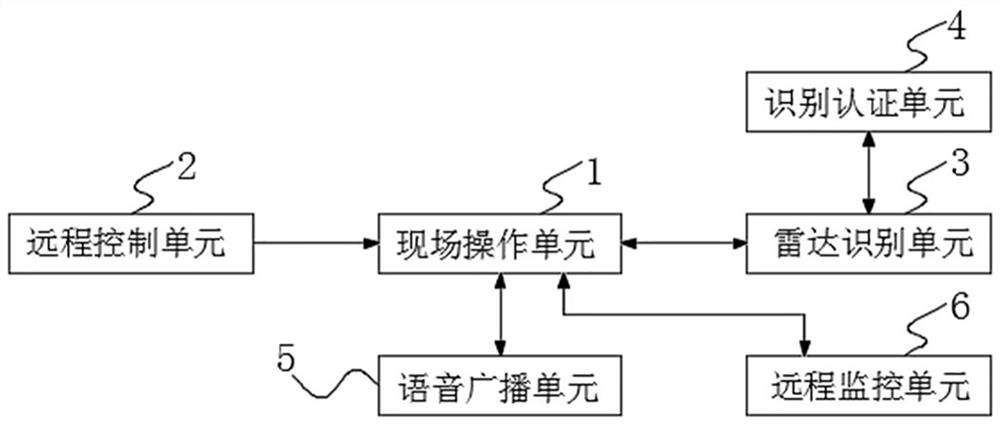
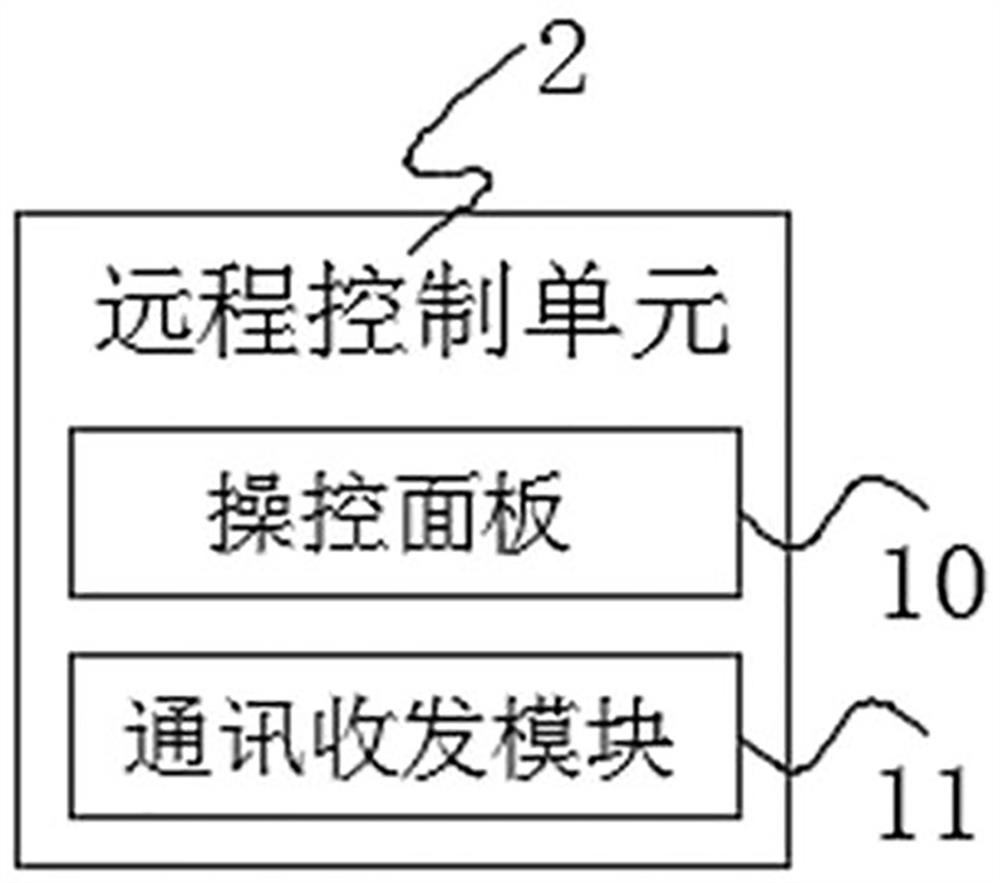
[0039]An unmanned loading system, including an on-site operation unit 1 and a remote control unit 2, the on-site operation unit 1 is used for on-site operation, and the crane tube is controlled by a pneumatic motor to control the mechanical arm to move in the X, Y and Z directions for The remote control unit 2 is docked with the on-site operation unit 1, and the remote control unit 2 is used to remotely control the operation of the air motor. The on-site operation unit 1 is connected with the radar identification unit 3, and the radar identification unit 3 is used to identify the vehicle pipe The position of the nozzle, and obtain the three-dimensional coordinates of the vehicle nozzle, calculate the movement trajectory of the crane pipe, and synchronize the three-dimensional coordinates of the vehicle nozzle and the movement trajectory data to the field operation unit 1, the radar identification unit 3 and the identification and authentication unit 4 Docking, wherein the ident...
Embodiment 2
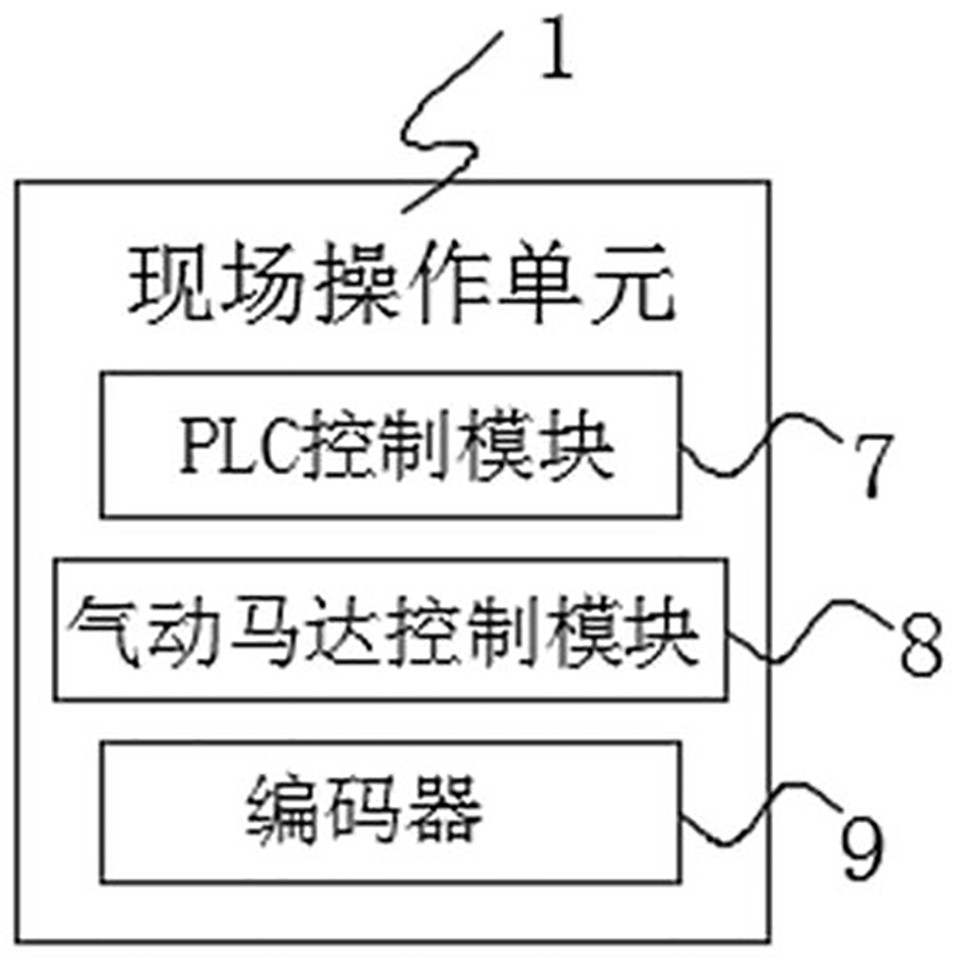
[0041] This embodiment is an improvement of the previous embodiment. An unmanned loading system includes an on-site operation unit 1 and a remote control unit 2. The on-site operation unit 1 is used for on-site operations, and the crane tube is controlled by a pneumatic motor to control the mechanical arm to perform X. , Y and Z direction movement, used to align the nozzle of the vehicle. As a detailed description, the nozzle of the vehicle uses a pneumatic valve to control the opening and closing, and the driver of the vehicle is responsible for opening or closing. When it is opened, the vehicle is in a flame-off state. Before the driver of the vehicle opens the pneumatic valve, it is necessary to complete the identification of the nozzle of the vehicle. Specifically, as attached figure 2 As shown, the field operation unit 1 includes a PLC control module 7, an air motor control module 8 and an encoder 9, wherein the air motor control module 8 is used to drive the mechanical a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More