

Multi-finger space cooperative control manipulator in high-risk pollution environment
A technology of polluting the environment and collaborative control, applied in the field of manipulators, can solve problems such as lack of algorithms, unity, and inability to complete fine work, and achieve high safety and high operability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
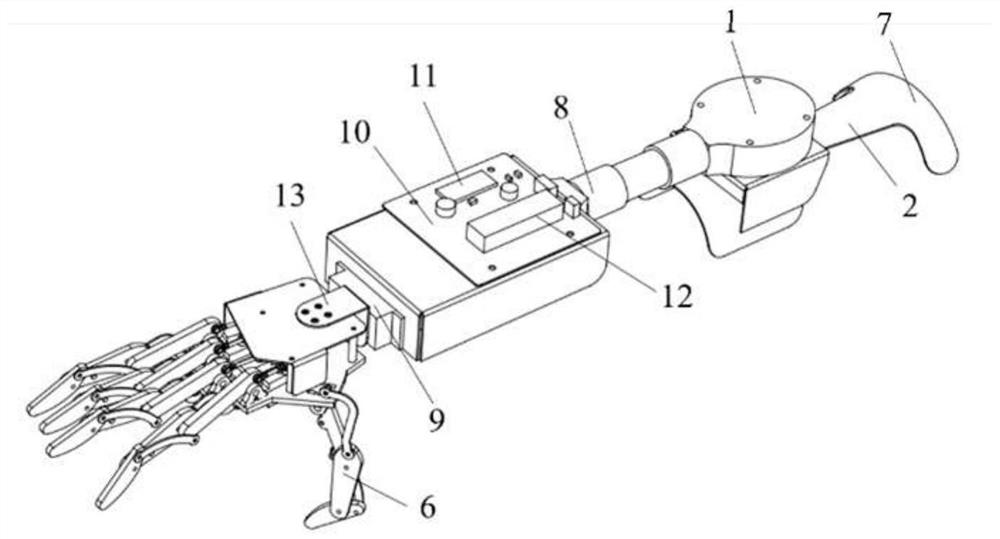
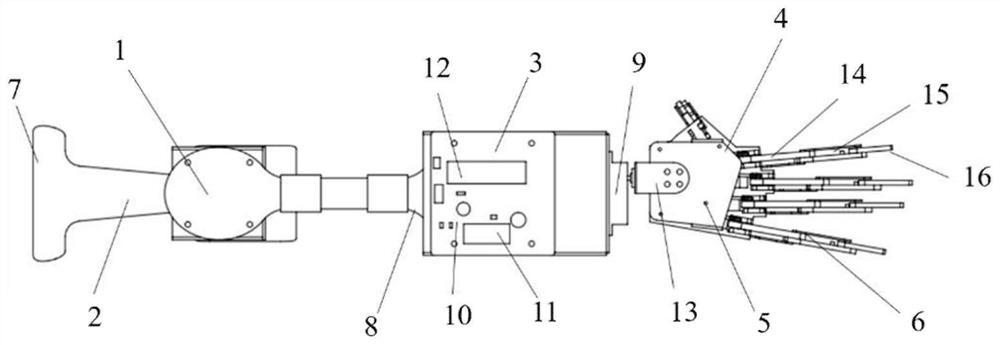
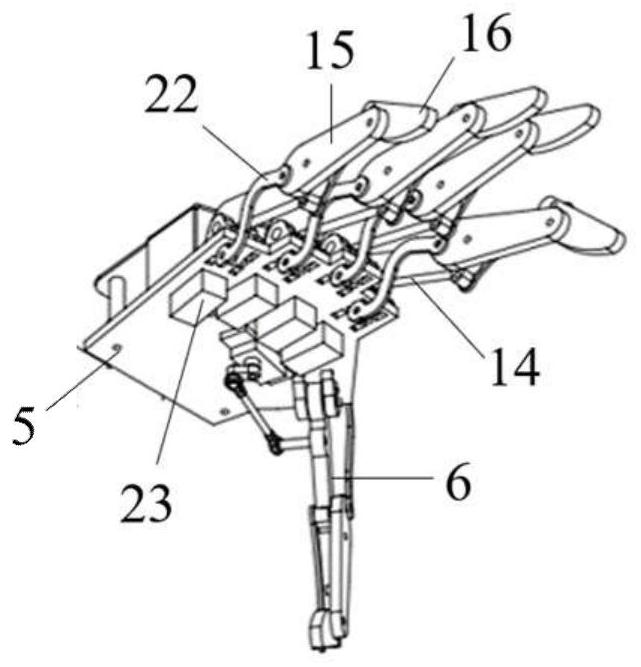
[0041] This embodiment provides an intelligent bionic gripper in a high-risk environment, including a bionic manipulator and a wearable sensory glove. The bionic manipulator includes a gripper support platform, a mobile control system, and a robotic gripper. Described claw support platform comprises U-line wearable structure, mobile control board support structure and mechanical claw support structure, and described mobile control system comprises Arduino control development board, bluetooth receiving sensor and STM32 data processing single-chip microcomputer, described mechanical claw Parts include fingers, palms and rotating supports, and the fingers are composed of heels, knuckles, and fingertips; the wearing sensing gloves include cotton silicone pattern wearing gloves, joint monitoring sensors, data processing development boards and Bluetooth transmission Sensor; Specific examples are as follows:
[0042] As a preferred mode of the present invention, the gripper support p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More