

Unmanned vehicle dynamic obstacle avoidance method based on particle filtering
A particle filter and dynamic obstacle avoidance technology, applied in the field of unmanned vehicles, can solve problems such as pose estimation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
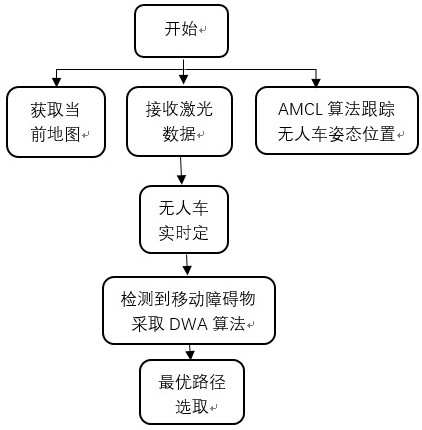
[0054] A dynamic obstacle avoidance method for an unmanned vehicle based on particle filtering, the unmanned vehicle is provided with a total control system, and a motion control system, an inertial navigation system, a laser radar module and an IMU module that are respectively connected to the total control system; The above-mentioned general control system is loaded with maps and unmanned vehicle operating system ROS control software.
[0055] The total control system is based on the STM32 controller. The STM32 controller is connected to the Raspberry Pi platform through the bus, and the Raspberry Pi platform communicates with the host computer through the Wi-Fi wireless network to complete the data return.
[0056] The inertial navigation equipment includes odometers and gyroscopes. The odometers, gyroscopes and lidar ranging devices are connected to the overall control system through signal lines to provide the original data of the unmanned vehicle's own positioning to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More