

Flexible joint robot system event trigger control method based on fuzzy observer
A robot system, flexible joint technology, applied in control/regulation systems, adaptive control, general control systems, etc., can solve problems such as increasing energy consumption, data redundancy, etc., to reduce control costs, reduce energy consumption, and save The effect of communication resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
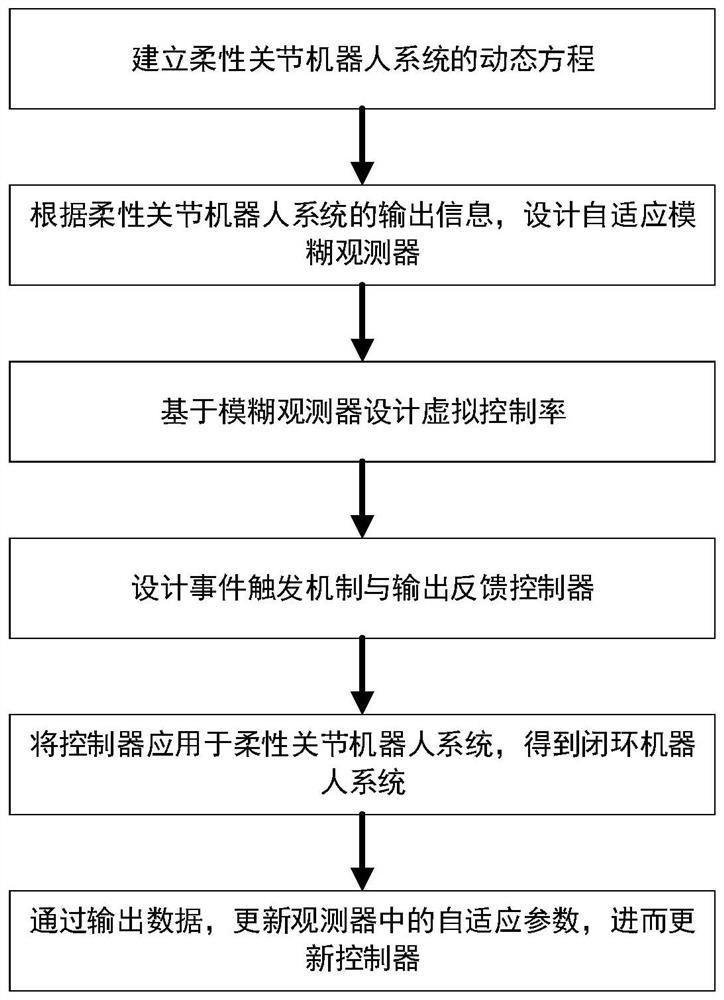
[0074] As a specific embodiment, step 2 includes:
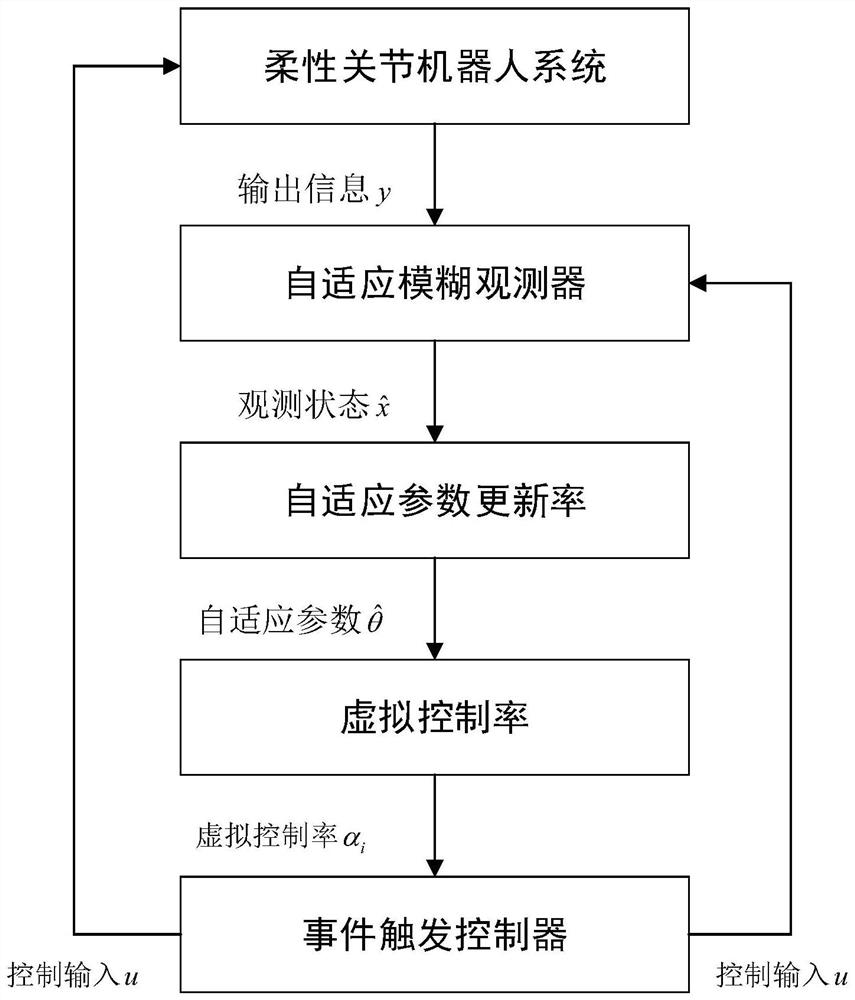
[0075] Define IF-THEN rules and membership functions for fuzzy sets. Design the adaptive fuzzy observer as follows:
[0076]
[0077] in as x(t)=(x 1 (t),x 2 (t),x 3 (t),x 4 (t)) estimates,
[0078]
[0079] The gain matrix L is chosen such that is the Hurwitz matrix, where Γ=(I n ,0,…,0), the matrix L i (i=1,2,3,4) is a diagonal matrix, Δ ω defined as Δ ω =diag(I n , I n / ω,I n / ω 2 , I n / ω 3 ), among them, I n is an n-order unit matrix. is an adaptive parameter, is a fuzzy membership function.
[0080] Proving that the error system is convergent, let
[0081]
[0082] So
[0083]
[0084] Therefore, let Available
[0085]
[0086] Construct the following V function
[0087]
[0088] Satisfy P
[0089]
[0090] Will M -1 (x 1 )(Kx 3 -C(x 1 ,x 2 )x 2 -G(x 1 )-F(x 2 )-Kx 1 ) blurred into Available
[0091]
[0092] in lambda M ( ) represents the largest eig...
Embodiment
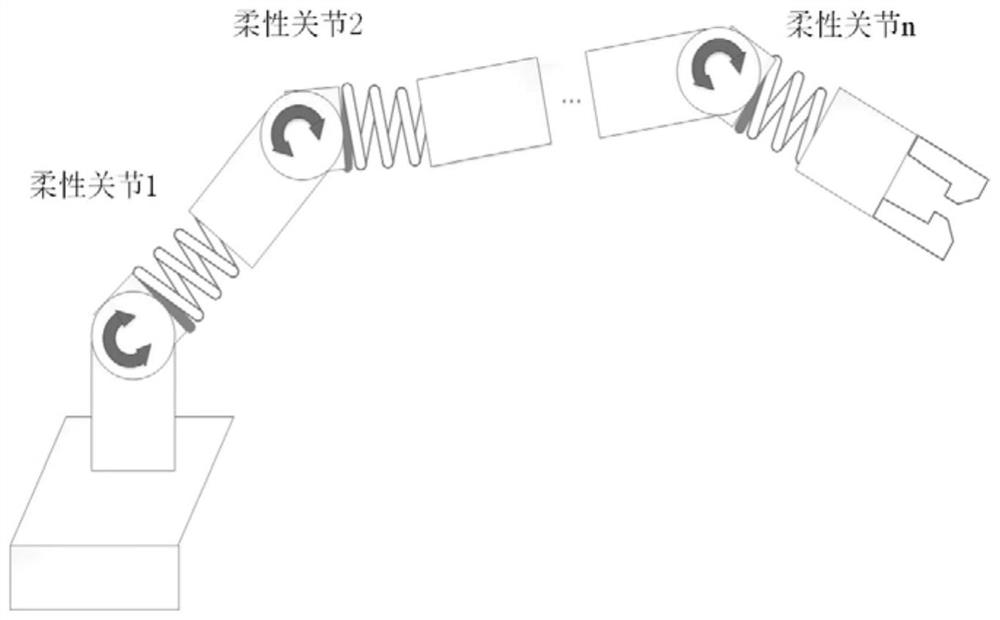
[0177] Next, the effectiveness of the design method in the present invention will be verified through a flexible joint robot system with two joints.
[0178]
[0179] Select a reference signal Design the following matrix
[0180]
[0181]
[0182]
[0183]
[0184] The parameter descriptions are shown in Table 1:
[0185] Table 1
[0186] parameter describe value unit parameter describe value unit m 1
Mass of connecting rod 1 2 kg B 1
Damping coefficient 1 none m 2
Mass of connecting rod 2 3 kg B 2
Damping coefficient 1 none l 1
The length of connecting rod 1 1 m K 1
joint stiffness 10 N m / rad l 2
The length of connecting rod 2 1 m K 2
joint stiffness 10 N m / rad J 1
joint flexibility 0.005 m / s 2
g acceleration of gravity 9.8 N / kg J 2
joint flexibility 0.005 m / s 2
[0187] in,
[0188] Construct the foll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More