

Multi-legged robot
A multi-legged robot and robot technology, applied in robot-related fields, can solve problems such as difficulty in realizing robot body control, difficulty in assembling robots, and poor robot motion performance, and achieve strong terrain adaptability, strong adaptability, and high running speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
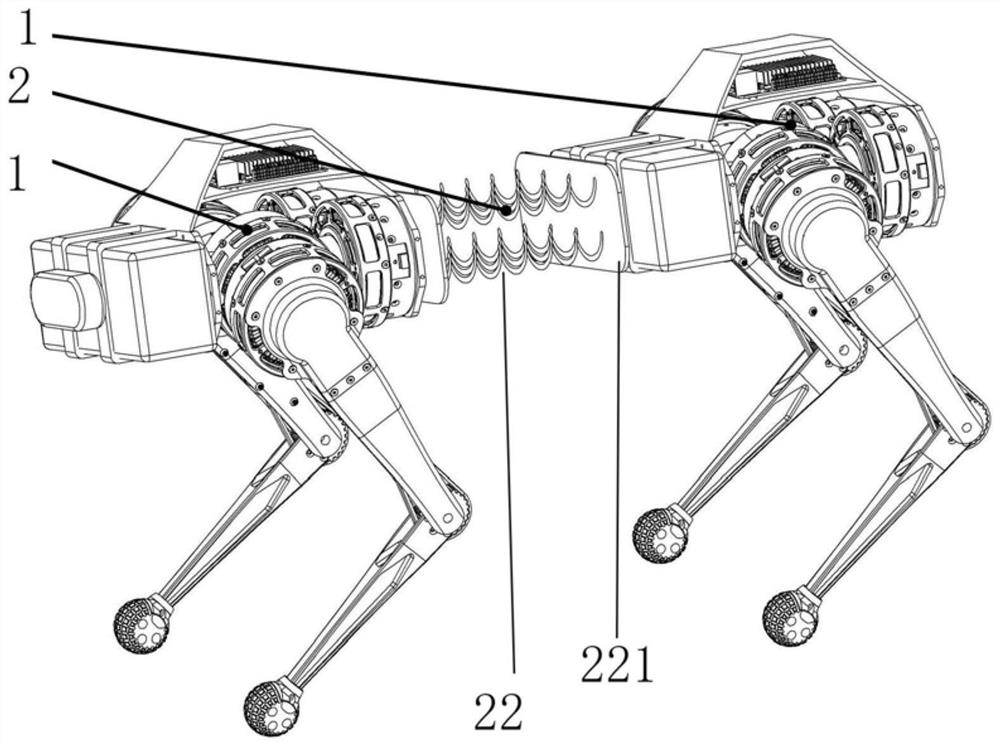
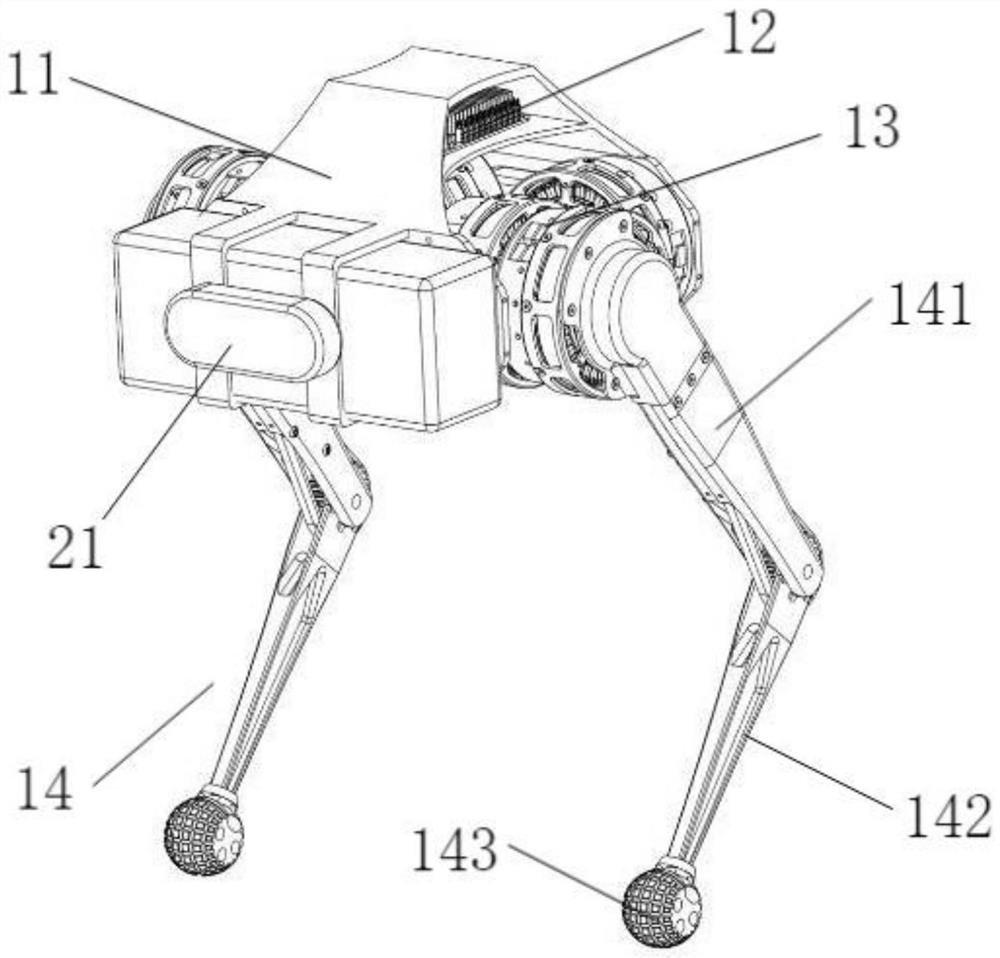
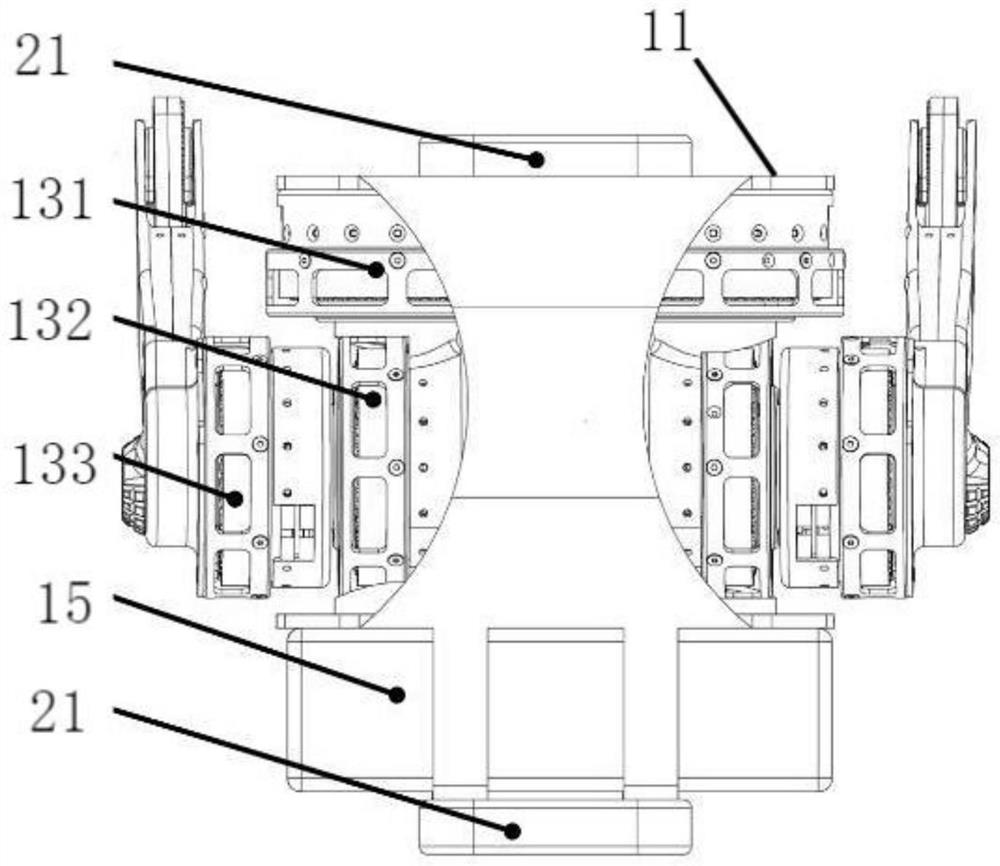
[0024] Combine below Figure 1-4 The present invention will be described in detail.
[0025] A multi-legged robot of the present invention, such as figure 1 , including at least two robot units 1, the robot unit includes a frame 11, a control mechanism 12, a drive mechanism 13 and a foot 14 are installed on the frame, at least two groups of feet are arranged, and a connecting structure 2 is passed between adjacent robot units Connected, the connecting structure 2 includes a connecting part 21 and an elastic part 22, the connecting part 21 is connected with the robot unit 1, the elastic part 22 is connected with the connecting part 21 on the adjacent robot unit 1, and the elastic part 22 is used as the spine of the multi-legged robot, While realizing the freedom to adjust the number of feet in modular assembly, it also enables the multi-legged robot to have a higher running speed potential with an elastic spine, and at the same speed, it has lower energy consumption and longer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More