Bayesian dynamic estimation algorithm of nonlinear or non-Gaussian distribution system
A non-Gaussian distribution, dynamic estimation technology, applied in the field of Bayesian dynamic estimation algorithm, can solve the problem of particle degradation and increase the invalid operation of the system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention is described below through specific implementation examples.
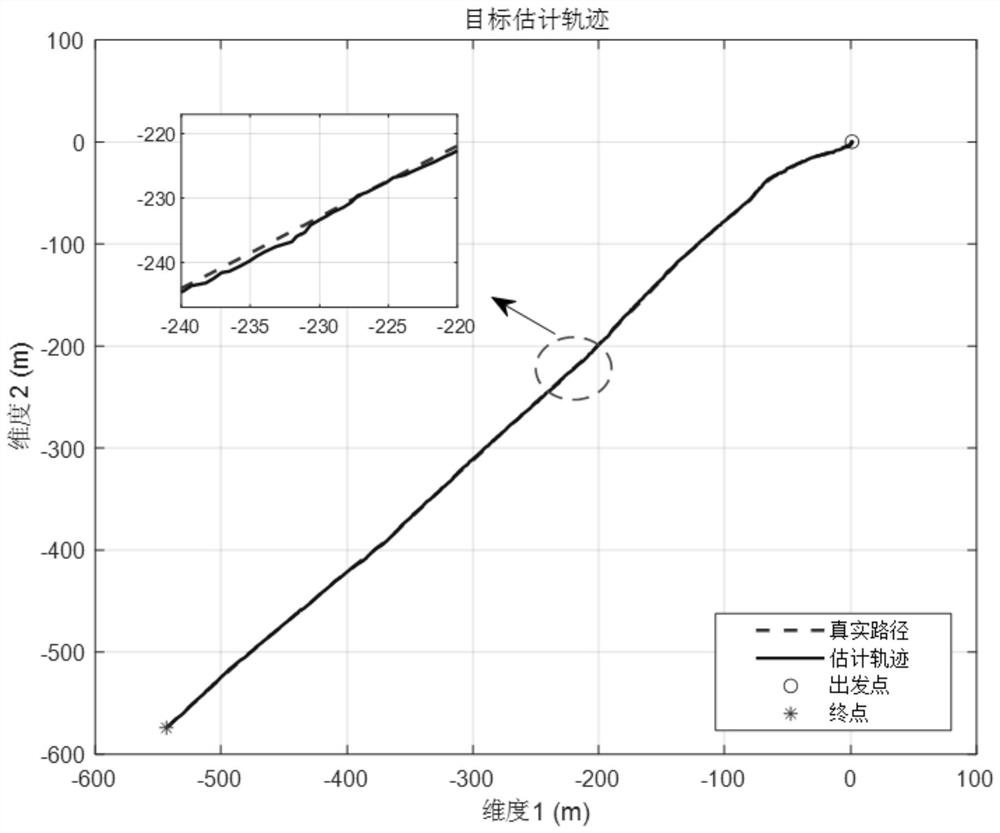
[0032] As an application of this algorithm, we combine range and Doppler shift based target position and velocity estimates. There is a moving target to be estimated, and the position and velocity information of the target is unknown. At each time i, there is a known position information as The sensor observes the target and obtains the relative distance d between the target and the sensor i and Doppler shift Δf i . We will use the above information to estimate the actual position x of the target i with velocity y i Make an estimate.
[0033] make Then the relative distance and Doppler frequency shift between the target and the sensor are:
[0034]
[0035]
[0036] Among them, f c is the carrier frequency, c is the propagation velocity of the carrier, and Both are Gaussian white noise and independent of each other.
[0037] due to f cand c are both constants in a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More