

Industrial robot positioning precision reliability analysis method based on evidence theory
A technology for industrial robots and positioning accuracy, applied in electrical digital data processing, instruments, complex mathematical operations, etc., can solve problems such as the inability to reasonably quantify the cognitive uncertainty of robot modeling parameters, and ignore the correlation of connecting rod size parameters. Achieve the effects of reducing over-conservative estimates, reducing solution costs, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principle of the present invention.
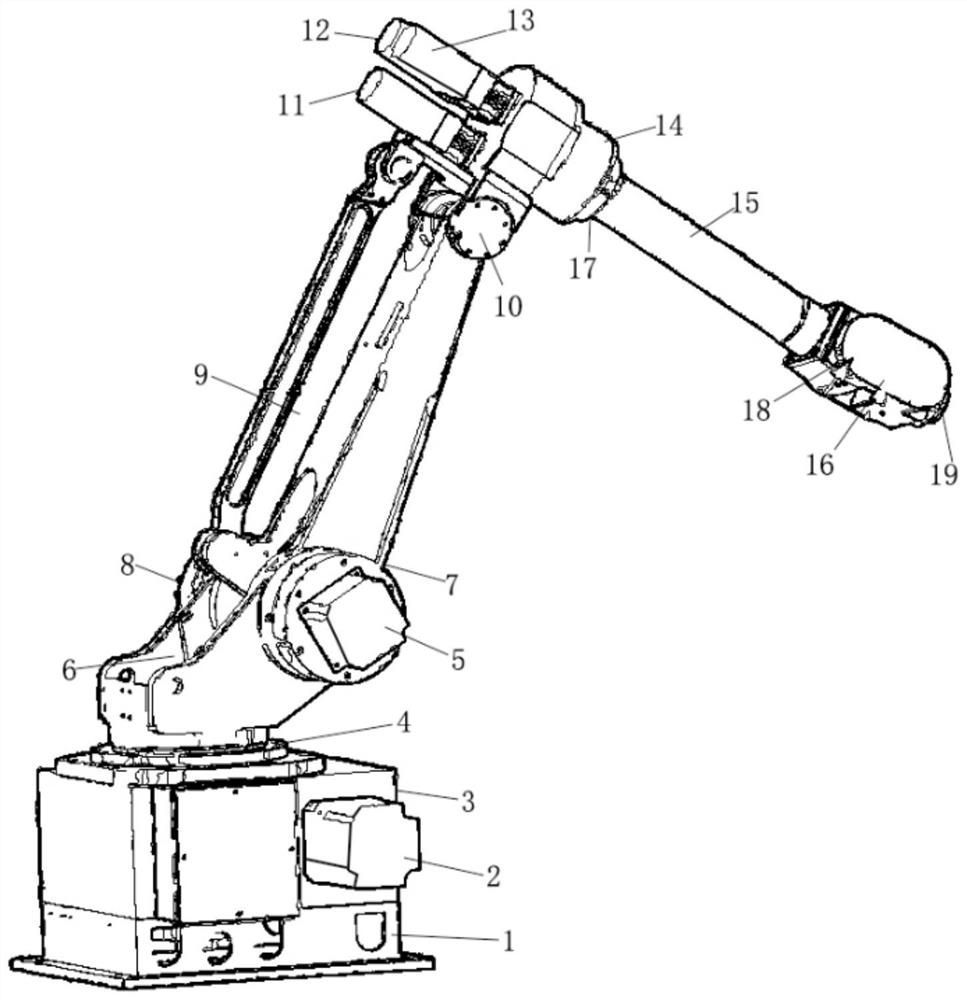
[0038] The present invention can be used for reliability analysis of positioning accuracy of all types of industrial robots. In order to describe the technical solution of the present invention in more detail, a six-degree-of-freedom serial industrial robot is used as an example for description.
[0039] The reliability analysis method of industrial robot positioning accuracy based on evidence theory specifically includes the following steps:
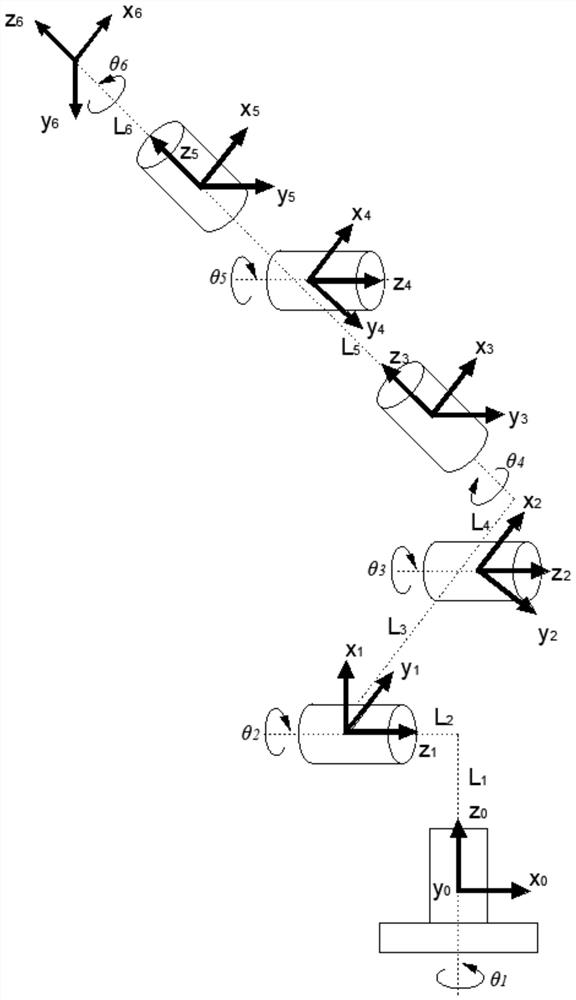
[0040] Step 1: Establish a reference coordinate system at each link joint of the industrial robot, establish a homogeneous transformation matrix between adjacent reference coordinate systems, and derive the link len...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More