

Underwater three-dimensional imaging system based on binocular single detector
A three-dimensional imaging and detector technology, applied in the field of three-dimensional imaging, can solve problems such as low signal-to-noise ratio, short imaging distance, and inability to meet the needs of practical applications, and achieve the effect of reducing costs and extracting simple and feasible results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
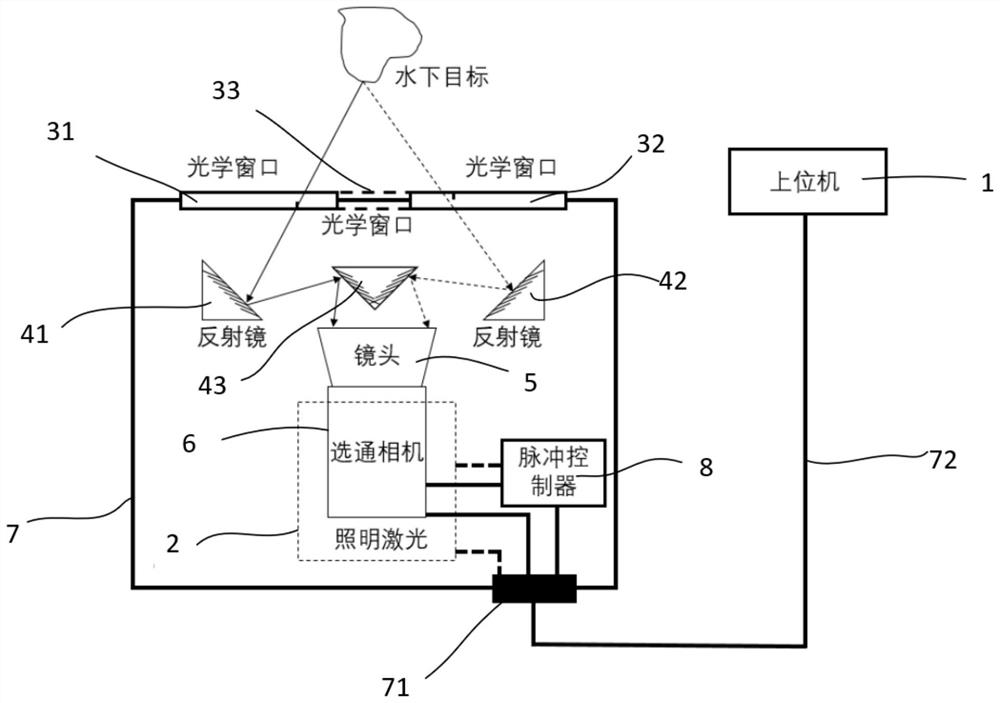
[0044] This embodiment provides a specific structure of an underwater three-dimensional imaging system based on a binocular single detector. See attached figure 1 , the control module 1 of the underwater three-dimensional imaging system based on the binocular single detector 6 of the present embodiment includes a host computer, the illumination light source 2 is an illumination laser, and the uniform light component includes a first optical window 31, a second optical window 32 and a first optical window 32. Three optical windows 33, the lens assembly includes a first reflector 41, a second reflector 42, a third reflector 43 and a lens 5, the first reflector 41 and the second reflector 42 are arranged on both sides of the third reflector 43 , the detector 6 is a gate camera. A watertight device 7 is provided for accommodating the lighting module and the imaging module. Specifically, the uniform light component is arranged on the watertight device 7 , and the lighting source 2...
Embodiment 2
[0052] This embodiment provides a specific structure of an underwater three-dimensional imaging system based on a binocular single detector 6 . See attached Figure 4 , the control module 1 of the underwater three-dimensional imaging system based on the binocular single detector 6 of the present embodiment includes a host computer, the illumination light source 2 is an illumination laser, and the uniform light component includes a first optical window 31, a second optical window 32 and a first optical window 32. Three optical windows 33, the lens assembly includes a first lens 51, a second lens 52, a first reflector 41, a second reflector 42 and a third reflector 43, and the third reflector 43 is rotatably arranged on the first reflector Between 41 and the second mirror 42, the detector 6 is a gate camera. A watertight device 7 is provided for accommodating the lighting module and the imaging module. Specifically, the uniform light component is arranged on the watertight devi...
Embodiment 3
[0061] See attached Figure 5 , the control module 1 of the underwater three-dimensional imaging system based on the binocular single detector 6 of the present embodiment includes a host computer, the illumination light source 2 is an illumination laser, and the uniform light component includes a first optical window 31, a second optical window 32 and a first optical window 32. Three optical windows 33, the lens assembly includes a first lens 51, a second lens 52, a first aperture 91, a second aperture 92, a first reflector 41, a second reflector 42 and a third reflector 43, the third Reflector 43 is arranged between first reflector 41 and second reflector 42, first aperture 91 is arranged between first reflector 41 and third reflector 43, and second aperture 92 is arranged between second reflector 41 and second reflector 42. Between the mirror 42 and the third mirror 43, the detector 6 is a gate camera. A watertight device 7 is provided for accommodating the lighting module ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More