

Mean filtering method and system
A mean value filtering and mean value technology, applied in the field of mean value filtering methods and systems, can solve the problems of indistinguishable defects, missed product detection, false detection, etc., and achieve the effect of good pre-processing effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
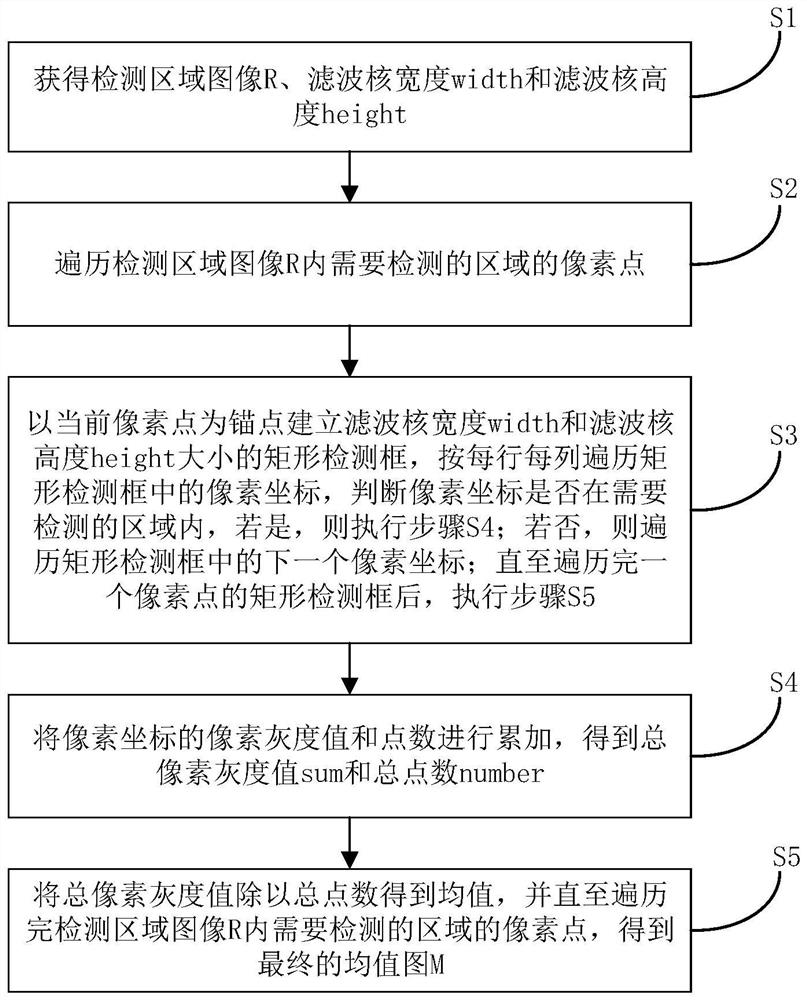
[0041] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
[0042] It should be noted that the flow charts shown in the drawings are only exemplary illustrations, and do not necessarily include all content and operations / steps, nor must they be executed in the order described. For example, some operations / steps can be decomposed, and some operations / steps can be combined or partly combined, so the actual order of execution may be changed according to the actual situation.
[0043] The block diagrams shown in the drawings are merely functional entities and do not necessarily correspond to physically separate entities. That is, these functional entities may be implemented in software, or in one or more hardware modules or integrated circuits, or in different networks and / or proces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More