DVL calibration method for ignoring horizontal attitude of AUV integrated navigation system
An integrated navigation system and horizontal attitude technology, which is applied in navigation, surveying and navigation, navigation through speed/acceleration measurement, etc., can solve problems such as ignorance, inability to effectively reflect the original speed measurement performance of DVL, and difficult estimation results of Kalman estimation method , to achieve the effect of improving positioning accuracy and high engineering application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be described in detail below with reference to the accompanying drawings and examples.
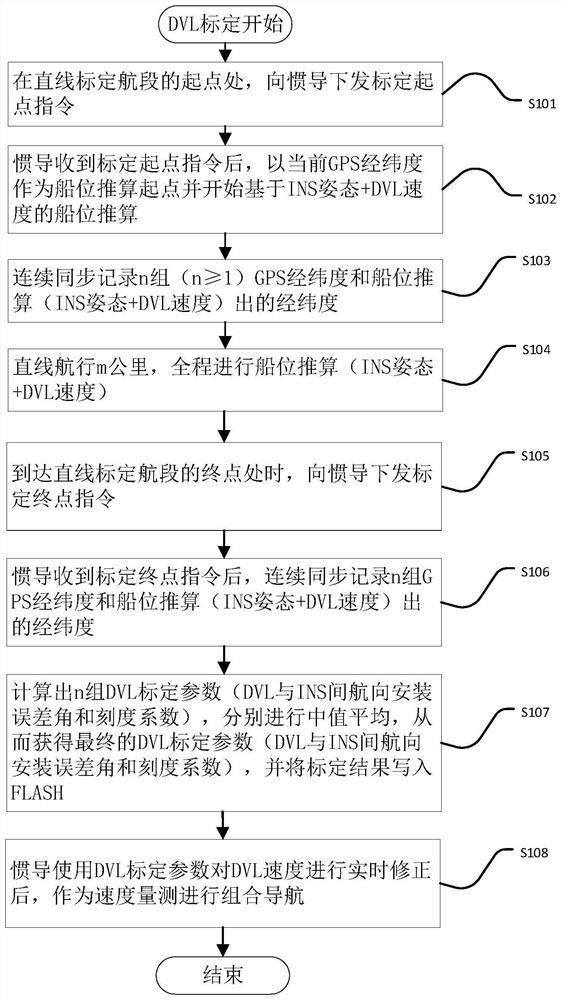
[0063] This embodiment provides a DVL calibration method in which the AUV integrated navigation system ignores the horizontal attitude, which can greatly improve the underwater navigation and positioning accuracy of the AUV integrated navigation system. The integrated navigation method can not effectively reflect the original performance of DVL and the installation relationship between INS, the calibration result is inaccurate due to the jump of a single set of GPS, the Kalman estimation method is difficult to implement in AUV engineering and the estimation result is inaccurate, etc., which has high engineering application value.
[0064] Define the coordinate system as follows:
[0065] System b: inertial measurement unit coordinate system (right-front-up);
[0066] b' system: DVL carrier coordinate system (right-front-up);
[0067] n system: navigatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com