

Wearable rigid-flexible hybrid driving finger joint rehabilitation training robot
A hybrid drive, rehabilitation training technology, applied in passive exercise equipment, physical therapy and other directions, can solve problems such as low degree of freedom, hidden dangers, cartilage tissue impact, etc., to achieve the effect of simple structure, ensuring safety, and reducing influencing factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
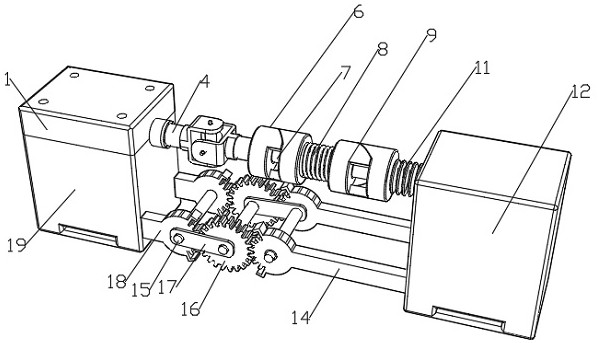
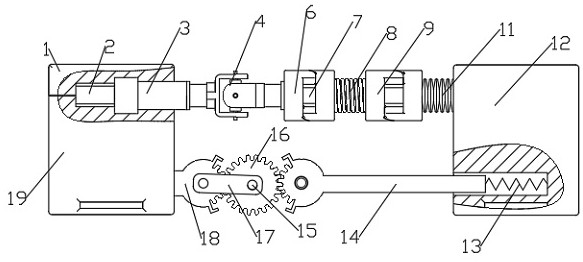
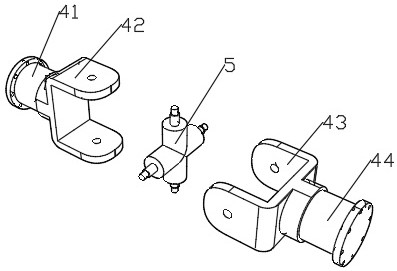
[0041] refer to Figure 1-3 , the invention is a wearable rigid-flexible mixed drive finger joint rehabilitation training robot.
[0042] For details, please refer to Figure 1-2 , the present invention includes:
[0043] Finger section one and finger section two 12, wherein, finger section one includes an upper end cover 1, and finger section one base 19;
[0044] The upper end cover 1 is connected with the finger section-base 19 with vertical screws, and there is a cavity between the two for placing the drive motor 2 and the reducer 3, the output shaft of the drive motor 2 and the input end of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More