

Non-cooperative low-thrust maneuvering target orbit determination method, device, equipment and medium
A maneuvering target, non-cooperative technology, applied in motor vehicles, space navigation equipment, space navigation equipment, etc., can solve problems such as unknown maneuvering strategy, difficult thrust acceleration modeling, and non-cooperative target.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0073] In order to make the objectives, technical solutions and advantages of the present application more clear, the present application will be further described in detail below with reference to the accompanying drawings and embodiments. It should be understood that the specific embodiments described herein are only used to explain the present application, but not to limit the present application.
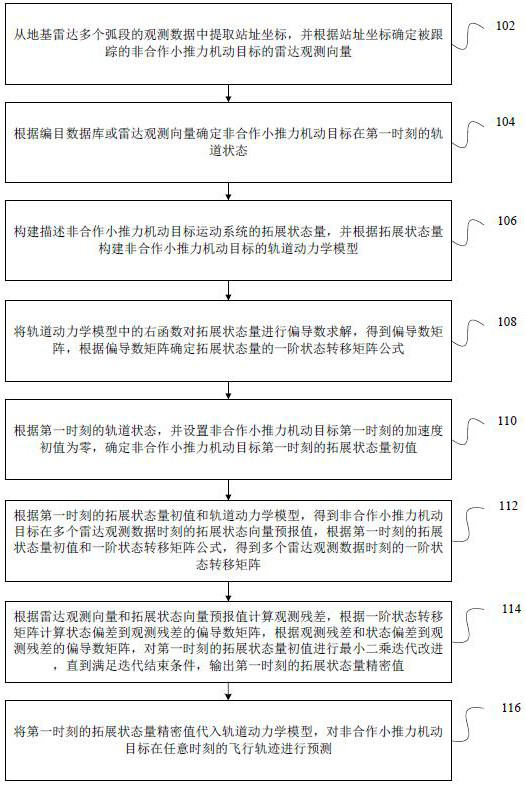
[0074] In one embodiment, as figure 1 As shown, a method for determining the orbit of a non-cooperative small thrust maneuvering target is provided, which includes the following steps:
[0075] Step 102 , extracting site coordinates from observation data of multiple arc segments of the ground-based radar, and determining the radar observation vector of the tracked non-cooperative low-thrust maneuvering target according to the site coordinates.
[0076] Specifically, the coordinates of the site, the azimuth, elevation, and slant range information of the observed non-cooperative ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More