

Spring type continuum robot system combined with flexible hinge
A robot system and flexible hinge technology, applied in the field of medical robots, can solve the problems of inability to achieve variable stiffness in different segments, small axial bearing capacity, axial deformation, etc., to solve the problem of insufficient axial bearing capacity and axial bearing capacity. Enhanced, easy-to-create effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
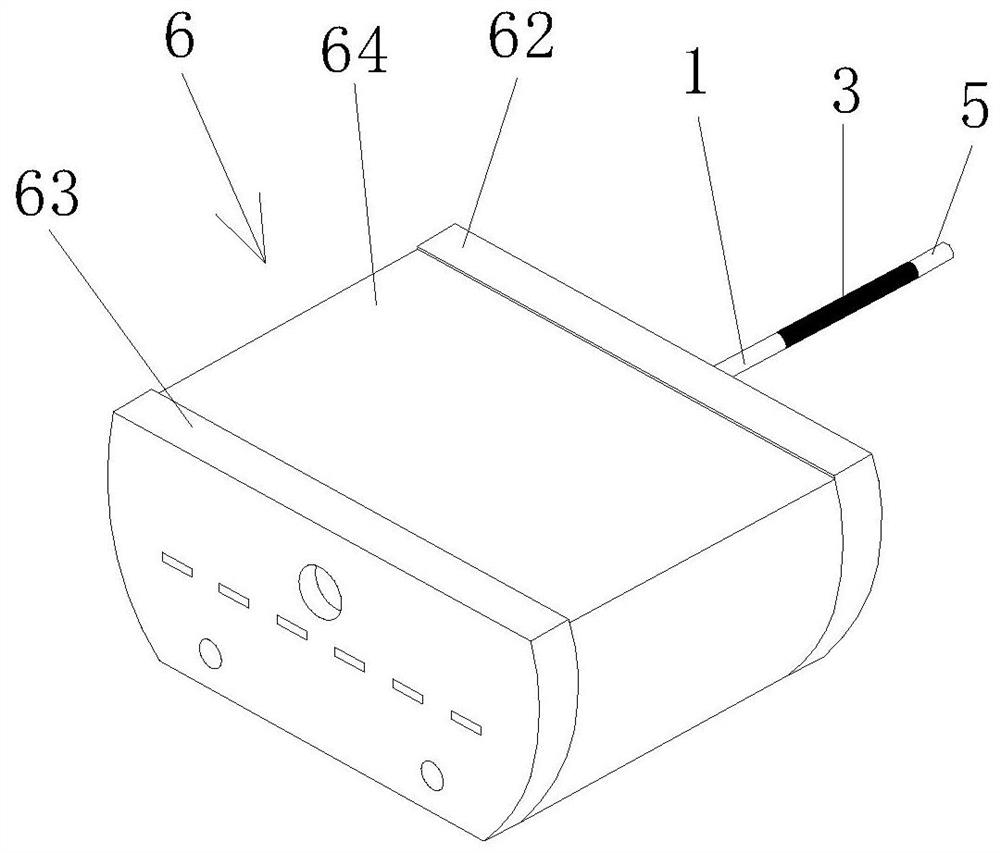
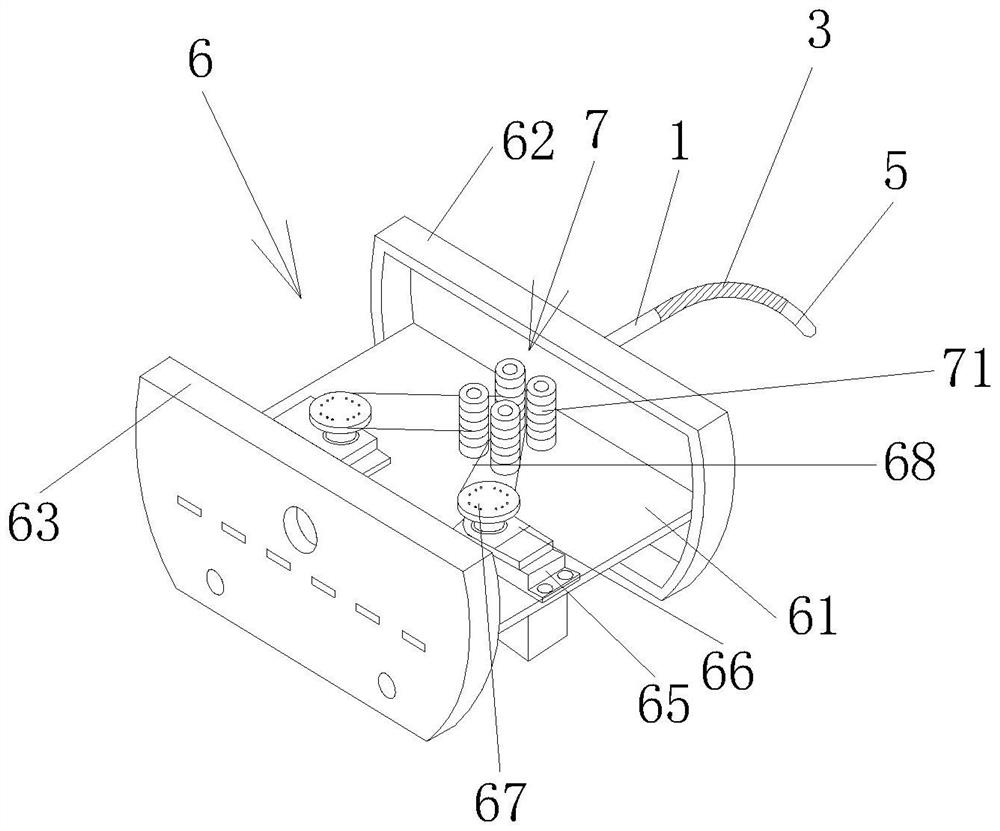
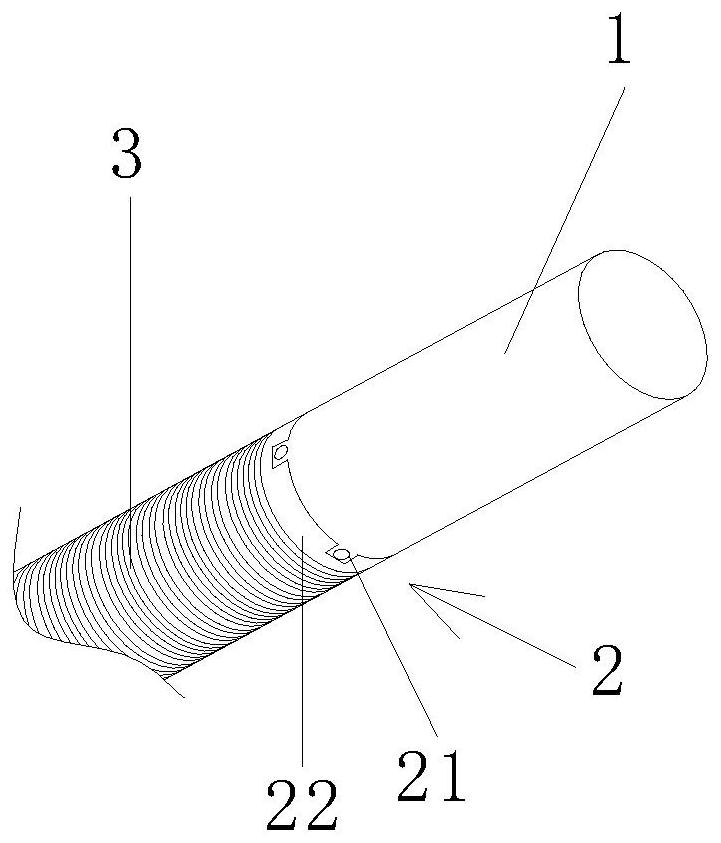
[0036] see Figure 1 to Figure 7 As shown, the present invention provides an embodiment: a spring-type continuum robot system combined with a flexible hinge, which includes a hollow cylinder 1, and the end of the hollow cylinder 1 is connected to a spring body 3 through a connecting piece 2. The spring main body 3 is provided with a cylindrical flexible hinge 4, and the end of the spring main body 3 is provided with a hollow connecting column 5 for placing an end effector; the front end of the hollow cylinder 1 is fixed to drive the spring main body 3 to bend on the drive mechanism 6. During surgery, different end effectors can be connected through the hollow connecting column 5 according to different surgical requirements, and then the driving mechanism 6 can drive the spring body 3 to bend, thereby realizing multi-directional movement.
[0037] read on figure 2As...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More