Rotor wing unmanned aerial vehicle wind disturbance resistance control method based on acceleration feedback enhancement
A rotor unmanned, control method technology, applied in vehicle position/route/altitude control, attitude control, control/adjustment system and other directions, can solve problems such as insufficient control methods, and achieve enhanced anti-disturbance ability, good maneuverability, good The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0038] The specific implementation manners of the present invention will be further described in detail below in conjunction with the drawings and specific implementation manners.
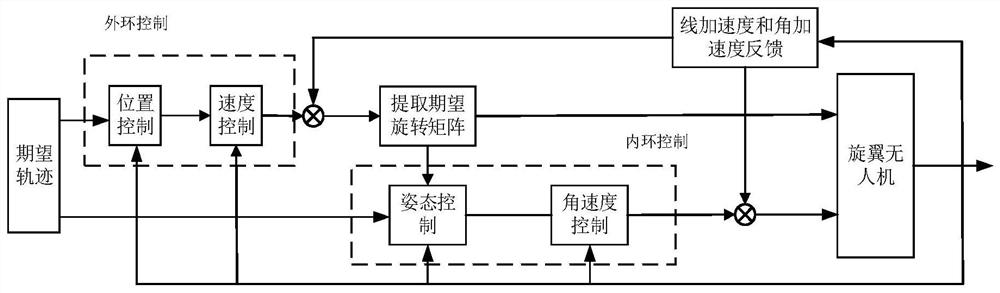
[0039] The present invention proposes a geometric control method based on acceleration feedback enhancement and cascade H of acceleration feedback enhancement ∞ The disturbance suppression method and the acceleration feedback method can effectively enhance the controller's ability to suppress disturbances, but there are algebraic loops and high-gain implementation problems, so pre-filtering is introduced for improvement. Design a geometric control method with acceleration feedback enhancement on the simple dynamic model of the UAV, then decouple the coupling model of the rotor into the form of inner and outer rings, and design a cascade H for the decoupled system ∞controller. This method improves the disturbance suppression ability and ensures the system stability. The specific steps are as follow...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com