

Automatic control method for operating robot to break lead
A technology for robots and wire cutting, which is applied in the field of operating robots and can solve the problem of inability to effectively cut wires of different specifications.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
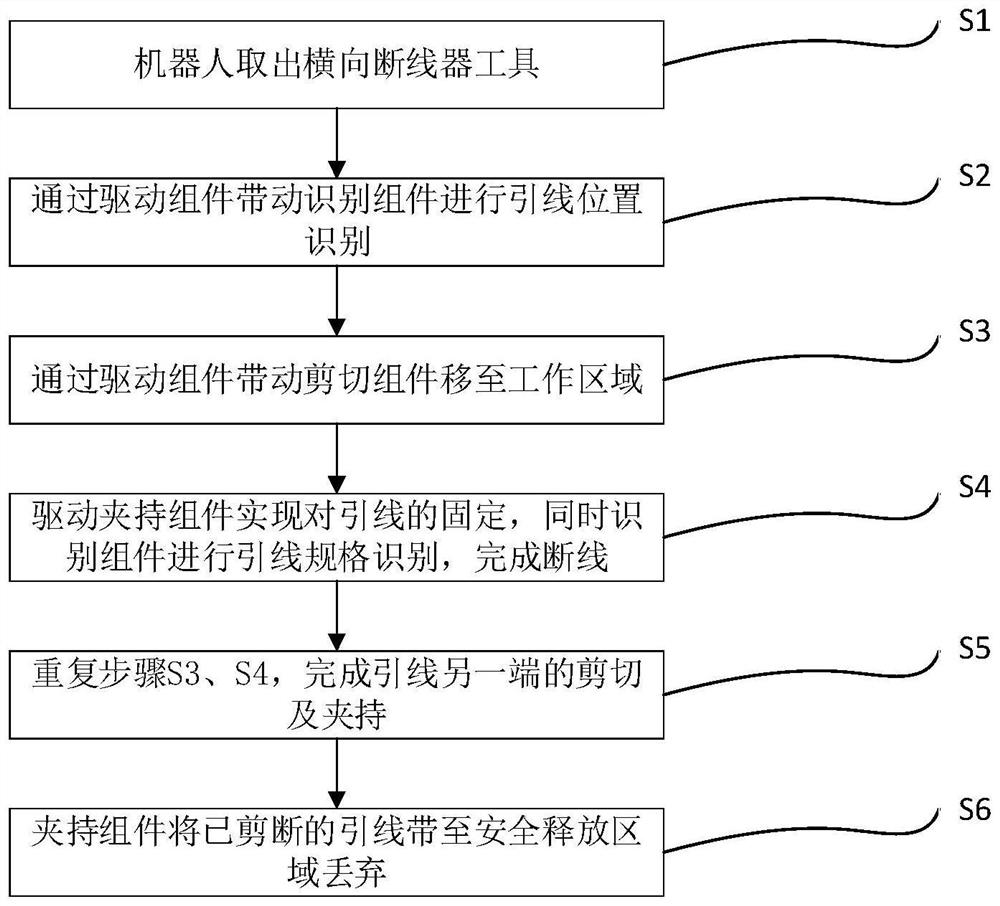
[0033] Embodiment: A kind of automatic control method for operating the robot to break the lead wire of this embodiment, such as figure 1 shown, including the following steps:
[0034] S1 robot takes out the transverse wire breaker tool;
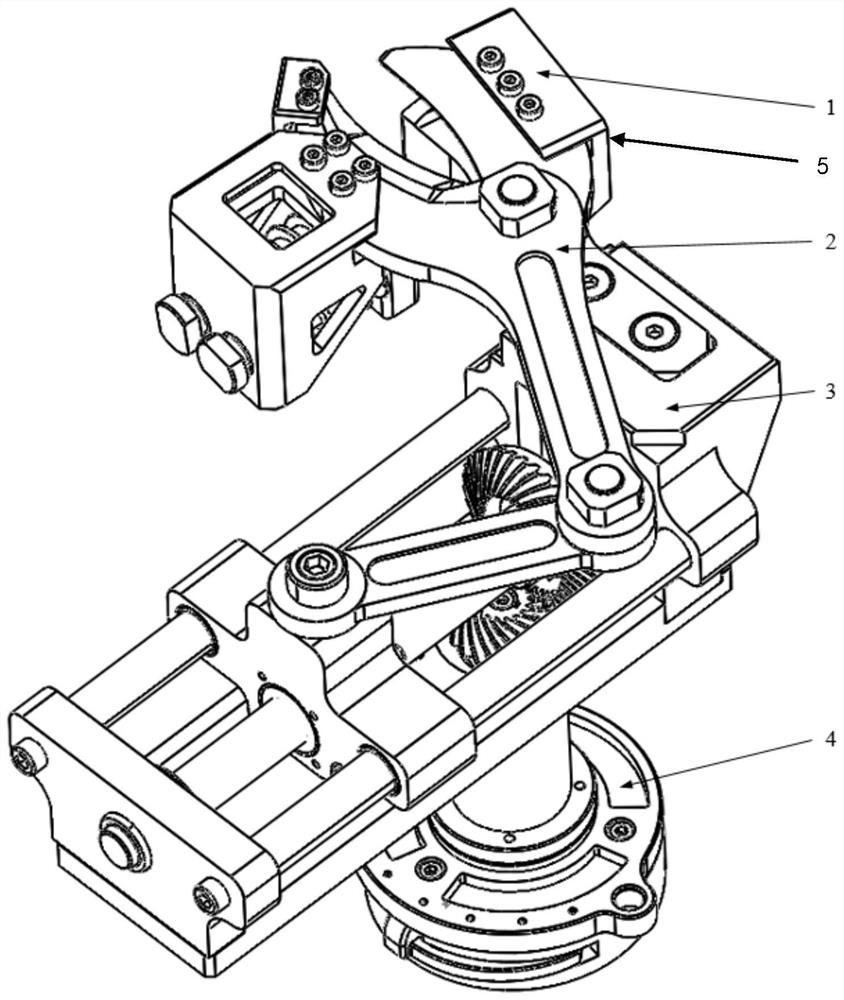
[0035] S2 drives the identification assembly 5 through the drive assembly 3 to identify the lead position;
[0036] S3 drives the shearing component 2 to move to the working area through the driving component 3, which specifically includes:
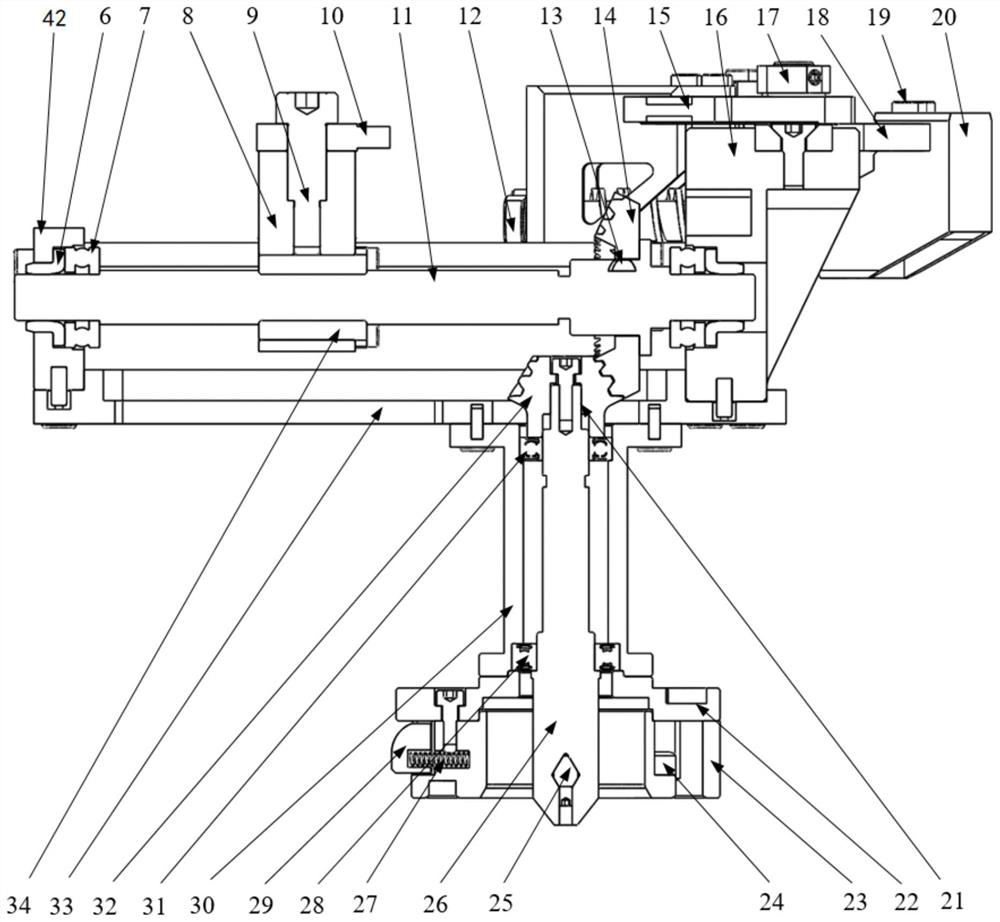
[0037] S3.1 drives the transmission shaft 26 to reverse, and drives the connecting rod 10 and the movable knife 15 in the shearing assembly 2 to move through the driving assembly 3, so that the movable knife 15 moves to the maximum opening limit;
[0038] S3.2 Deliver the horizontal wire breaker tool to the operation area and compare the position of the thread trimmer;
[0039] S3.3 After the thread trimming position is determined, the manipulator moves to make the horizontal thread breaker gradually...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More