Adaptive Kalman noise estimation method and system based on data fusion
An adaptive Kalman and data fusion technology, applied in the field of noise estimation, can solve problems such as unknown second-order moment, and achieve the effect of improving accuracy and solving filtering problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037] (1) Use multiple sensors to track the dynamic target, and obtain the observation value of each sensor. For example in a vehicle model
[0044] Consider the following model:
[0045]
[0047]
[0050]
[0051]
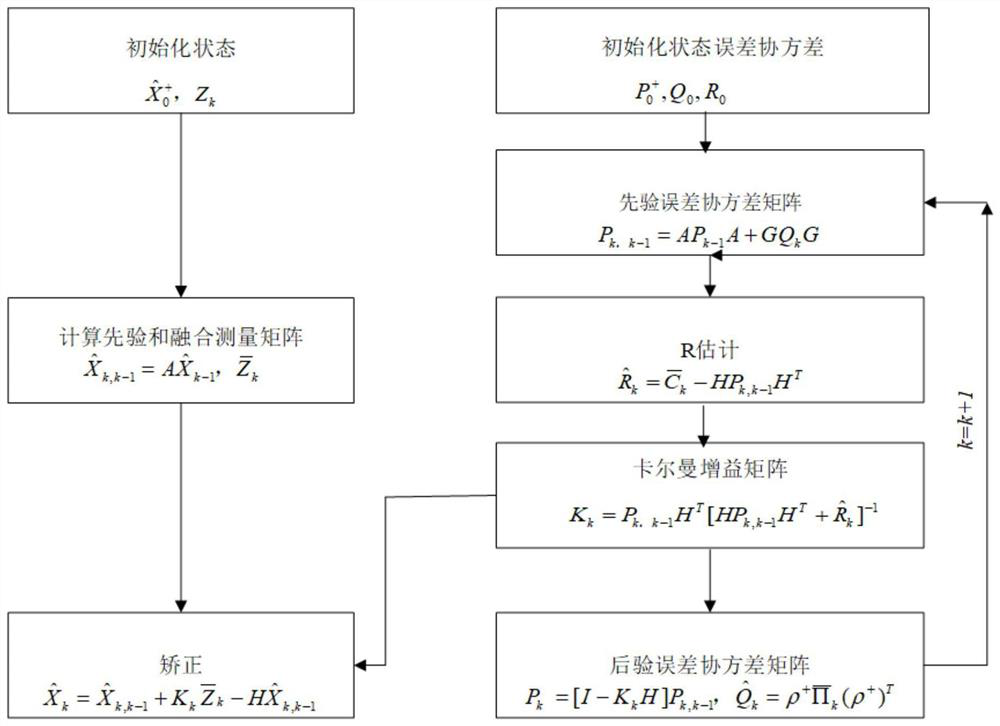
[0053] Based on equation (1), the process of the classical Kalman filter can be divided into two steps.
[0055]
[0056] P
[0059] K
[0060]
[0061] P
[0065]
[0067]
[0069]
[0070] As long as the variance is as small as possible, the value is closer to the true value, then:
[0071]
[0073]
[0075]
[0080] Z
[0081] Suppose there are i sensors, where (1≤s≤i):
[0082]
[0083] is the t-th component (1≤t≤m) measured by the s-th sensor at time k.
[0085]
[0087]
[0090] When p=1; represents the p-th component after the v-th data fusion.
[0093] The following assumptions and lemmas are given first.
[0096] Theorem 1: Under the premise of Assumption 2, the variance of F can be estimated as:
[0097]
[0099]
[0101]
[0104]
[0105] Therefore, in ord...
Embodiment 2
[0165] By analogy, the observation data fusion of multiple sensors is completed to obtain the fusion observations of multiple sensors;
[0169] The proposed system can be implemented in other ways. For example, the system embodiments described above are only
Embodiment 3
[0171] This embodiment provides a computer-readable storage medium on which a computer program is stored, the program being processed
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More