

Robot and take-out cabinet interaction system and interaction method
An interaction system and robot technology, applied in the field of interaction system between robots and takeaway cabinets, can solve the problems of large floor space, long interaction time, low interaction efficiency, etc., to reduce the floor space, simplify the overall structure, and eliminate cumbersome steps. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
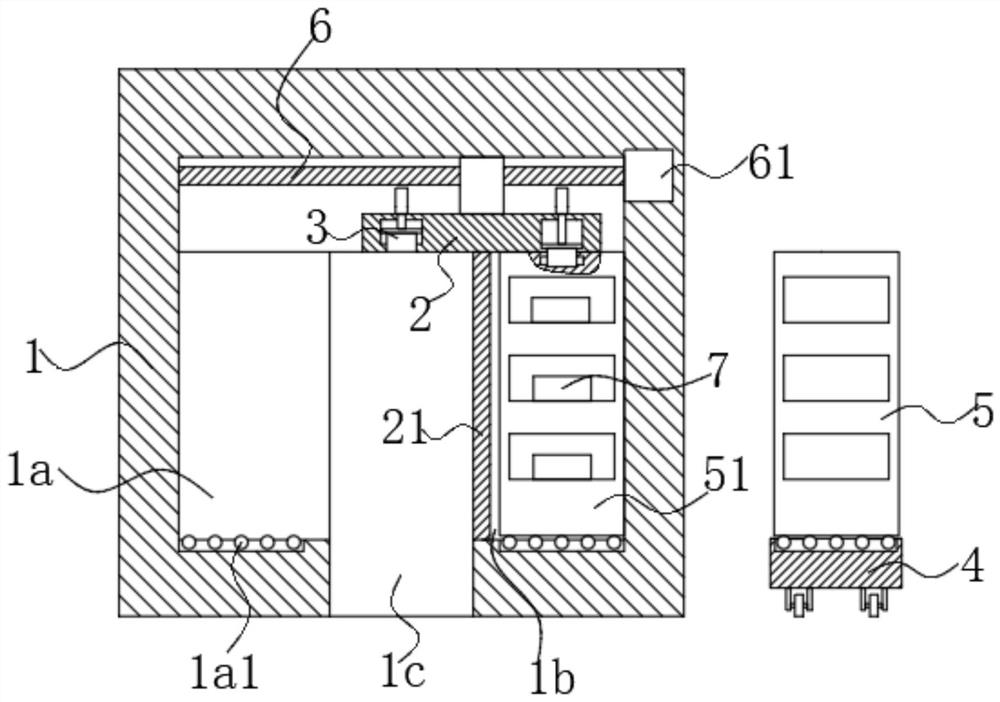
[0035] see figure 1 , In this embodiment, an interaction system between a robot and a take-out cabinet includes a take-out cabinet 1, two cargo boxes and a robot 4. The take-out cabinet 1 is provided with two cabinet cavities 1a, 1b and a box-changing bin 1c, and the box-changing bin 1c Located between the two cabinet cavities 1a, 1b, a transfer seat 2 is slidably arranged in the takeaway cabinet 1, and the transfer seat 2 is provided with a locking mechanism 3 that locks with the cargo box to realize synchronous movement. When the robot 4 carries empty goods When the box 5 is moved into the box changing compartment 1c, the transfer seat 2 is locked with the empty cargo box 5 and the loaded cargo box 51 in one of the cabinet chambers through the locking mechanism 3, and the transfer seat 2 faces the direction of the other cabinet chamber. Sliding and driving the empty cargo box 5 and the loaded cargo box 51 to move synchronously, so that the empty cargo box 5 enters another em...
Embodiment 2
[0051] see Figure 9 , In this embodiment, a method for interacting between a robot and a takeaway cabinet is implemented based on the interaction system between a robot and a takeaway cabinet in the above-mentioned embodiment, including:
[0052] Step S1: it is detected that the robot 4 carries the empty cargo box 5 and moves to the box changing compartment 1c of the takeaway cabinet 1;
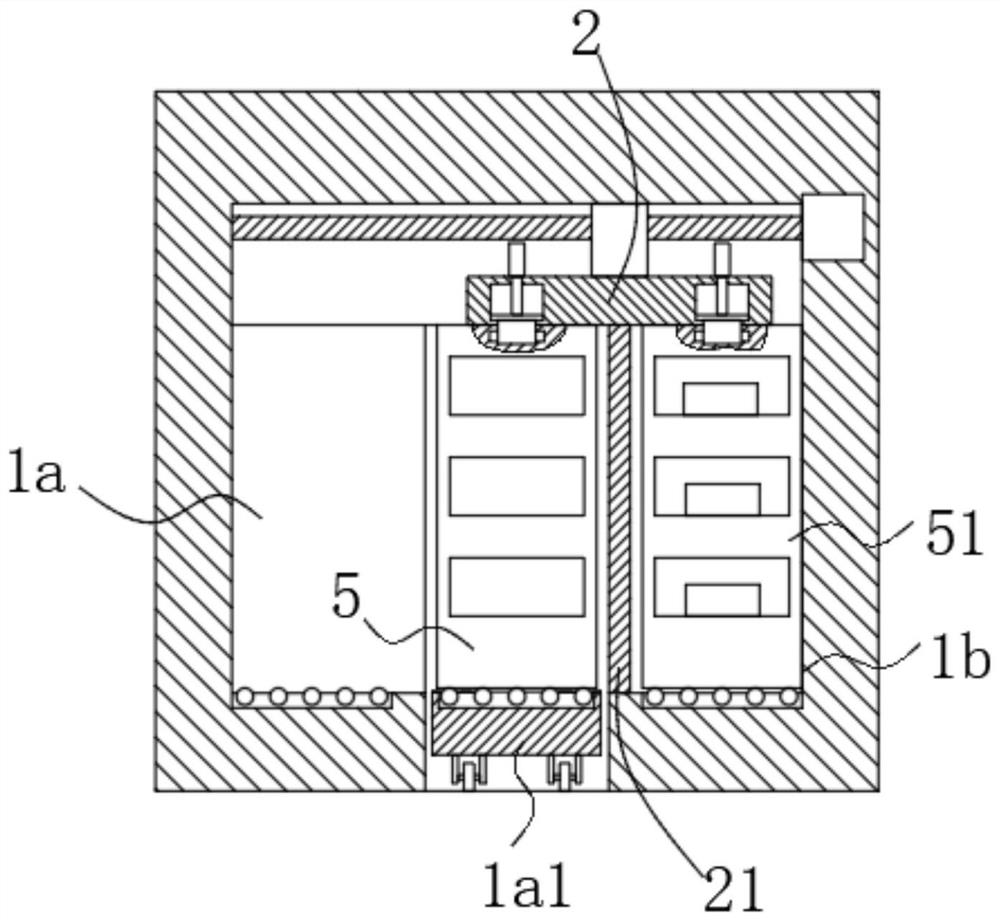
[0053] Step S2: the locking device 3 in the transfer seat 2 is respectively locked and linked with the empty cargo box 5 and the loaded cargo box 51 in the first cabinet cavity 1a;
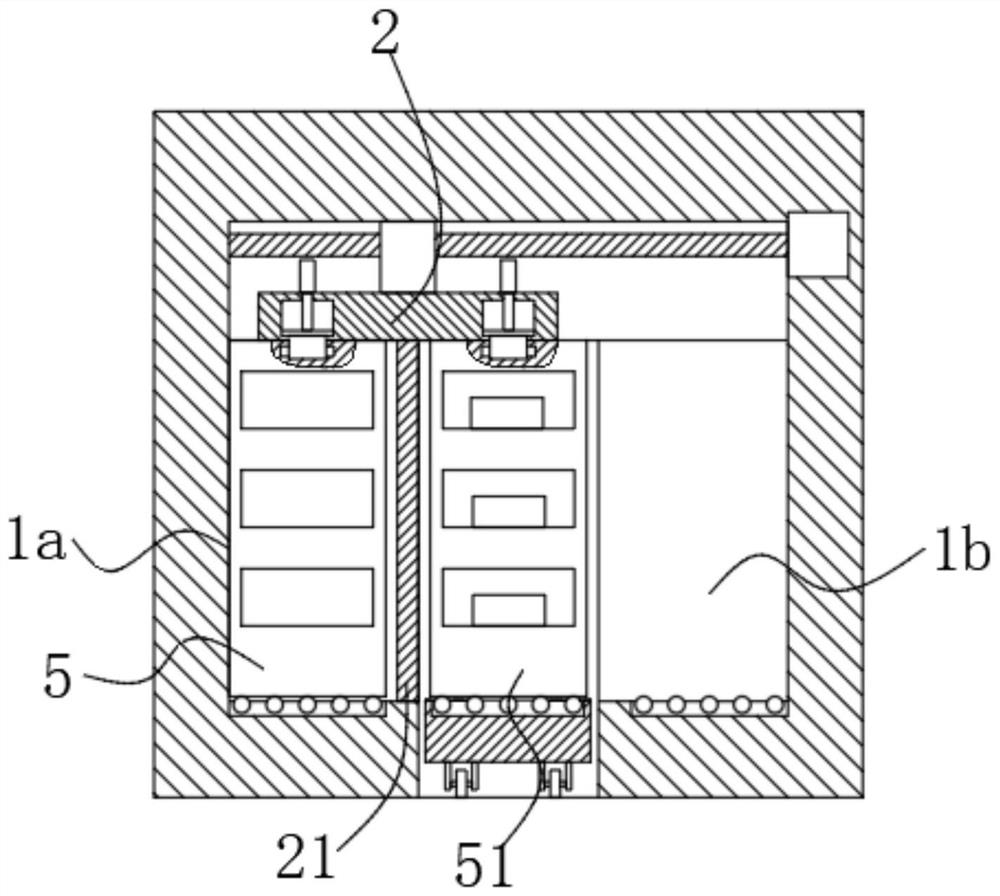
[0054] Step S3: The transfer base 2 carries the empty cargo box 5 and the loaded cargo box 51 and slides synchronously toward the second cavity cabinet 1b, the second cavity cabinet 1b is an empty cavity cabinet, and the loaded cargo box 51 is moved to the robot 4, the empty cargo box 5 is moved to the second cavity cabinet 1b, and the first cavity cabinet 1a is in an empty state;
[0055] Step S4: The locking...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More