

Human body action recognition method and system
A technology for human action recognition and human coordinate system, which is applied in the field of human action recognition methods and systems, can solve problems such as the inability to meet the needs of anti-fall, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
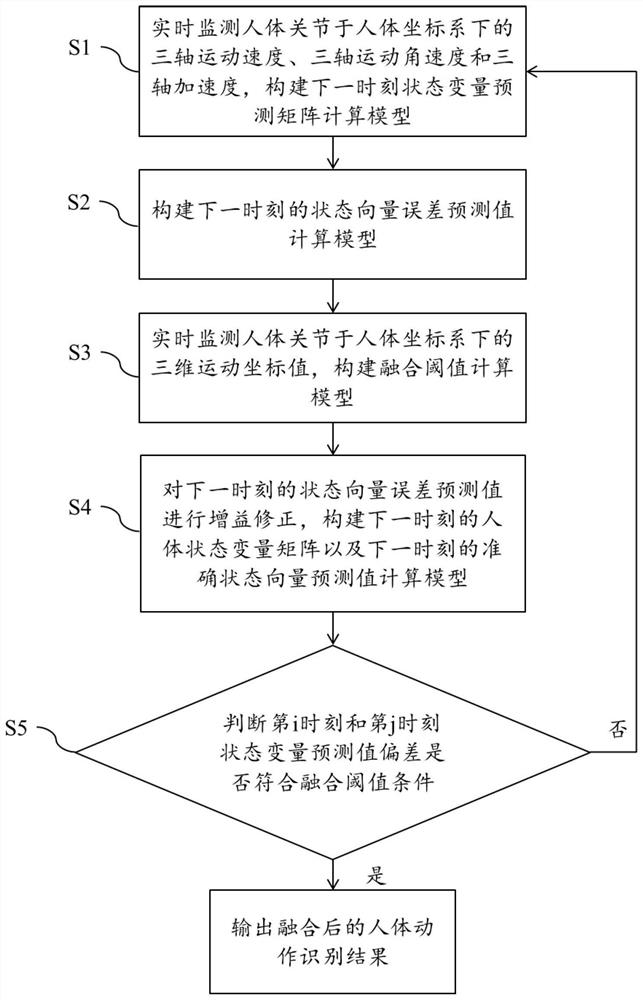
[0072] like figure 1 As shown, the human body motion recognition method provided by this embodiment, the method converts the human body motion recognition result into feature information, and the feature information is 3D key point information, including the following steps:
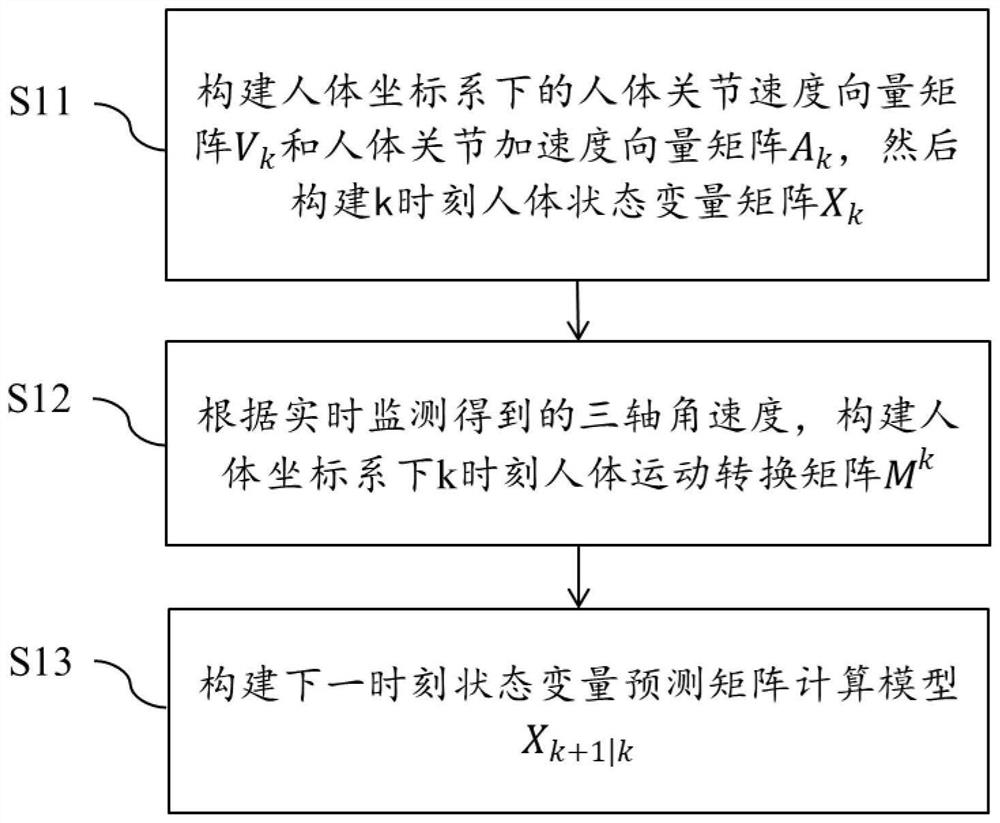
[0073] S1: Monitor the three-axis motion velocity, three-axis motion angular velocity and three-axis acceleration of human joints in the human coordinate system in real time, and construct a state variable prediction matrix calculation model X at the next moment k+1|k ;
[0074] S2: Build the state vector error prediction value calculation model P at the next moment k+1|k ;
[0075] S3: Monitor the three-dimensional motion coordinate values of human joints in the human coordinate system in real time, and construct a fusion threshold calculation model;
[0076] S4: the next moment state variable prediction model matrix X constructed according to the step S1 k+1|k and the state vector error predictio...
Embodiment 2
[0079] like figure 1 As shown, the human body motion recognition method provided by this embodiment, the method converts the human body motion recognition result into feature information, and the feature information is 3D key point information, including the following steps:
[0080] S1: Monitor the three-axis motion velocity, three-axis motion angular velocity and three-axis acceleration of human joints in the human coordinate system in real time, and construct a state variable prediction matrix calculation model X at the next moment k+1|k ;
[0081] S2: Build the state vector error prediction value calculation model P at the next moment k+1|k ;
[0082] S3: Monitor the three-dimensional motion coordinate values of human joints in the human coordinate system in real time, and construct a fusion threshold calculation model;
[0083] S4: the next moment state variable prediction model matrix X constructed according to the step S1 k+1|k and the state vector error predictio...
Embodiment 3
[0115] On the basis of Embodiment 2, as a preferred embodiment of the present invention, the fusion threshold condition in step S4 is 0.01i , X j )i , X j ) ≥ 0.3, then repeat steps S1-S4 to ensure smooth fusion of the human body motion parameters at each moment, so that the final output of the human body motion state parameter results at the ith moment and the human body motion state parameter results at the jth moment are smooth and uninterrupted. Fusion to form accurate human motion state data from the i-th time to the j-th time;
[0116] The fusion threshold D (X i , X j ) is calculated as follows:
[0117]
[0118] where τ q is the i-th state variable matrix X i to the jth state variable matrix X j The weight coefficient of the qth joint in all state variable matrices of , |X i | is the state variable matrix X at the i-th time i rank of , |X j | is the state variable matrix X at the jth time j rank.
[0119] As a preferred embodiment of the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More