

Human hand trajectory prediction and intention recognition method based on multi-feature fusion
A multi-feature fusion and trajectory prediction technology, applied in the field of visual recognition, can solve problems such as complex working environment, long hand travel, and unstable efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
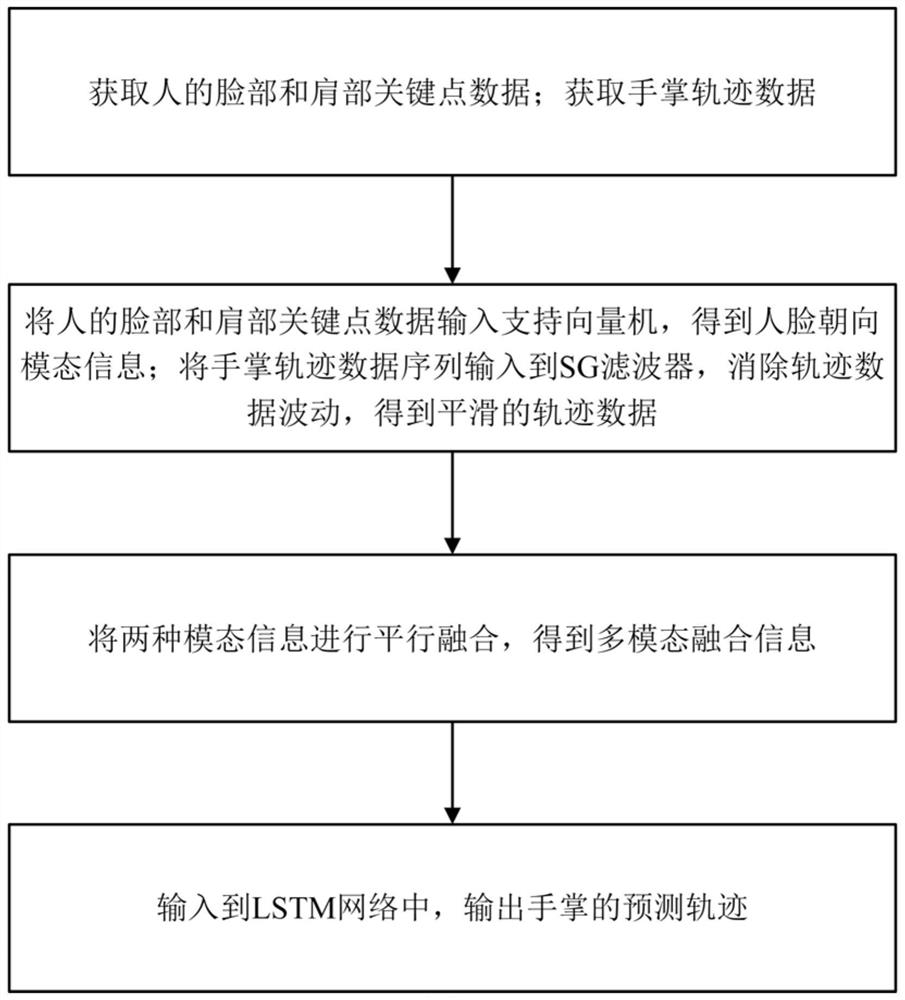
[0028] like figure 1 A schematic flowchart of the method of the present invention: this multi-feature fusion-based method for human hand trajectory prediction and intention recognition provided by the present invention includes the following steps:
[0029] S1. Obtain the key point data of the face and shoulder of the person; obtain the palm trajectory data;
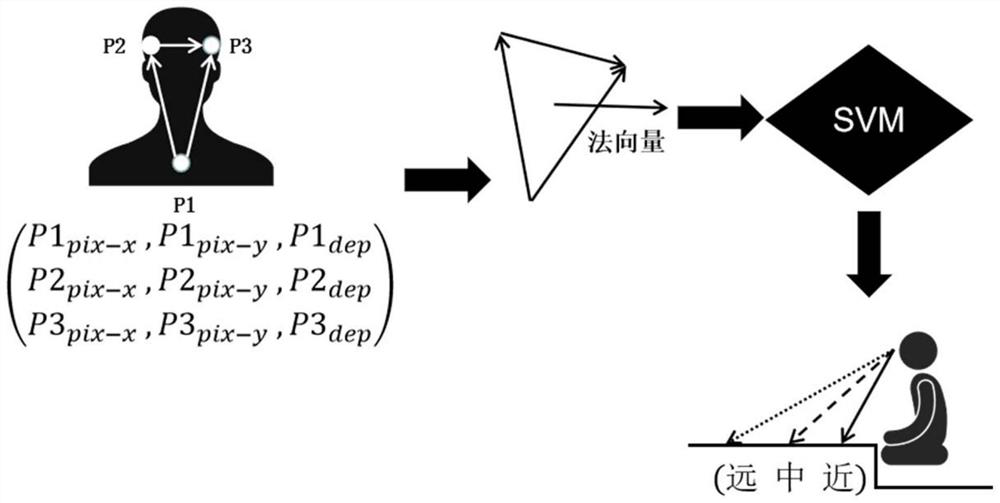
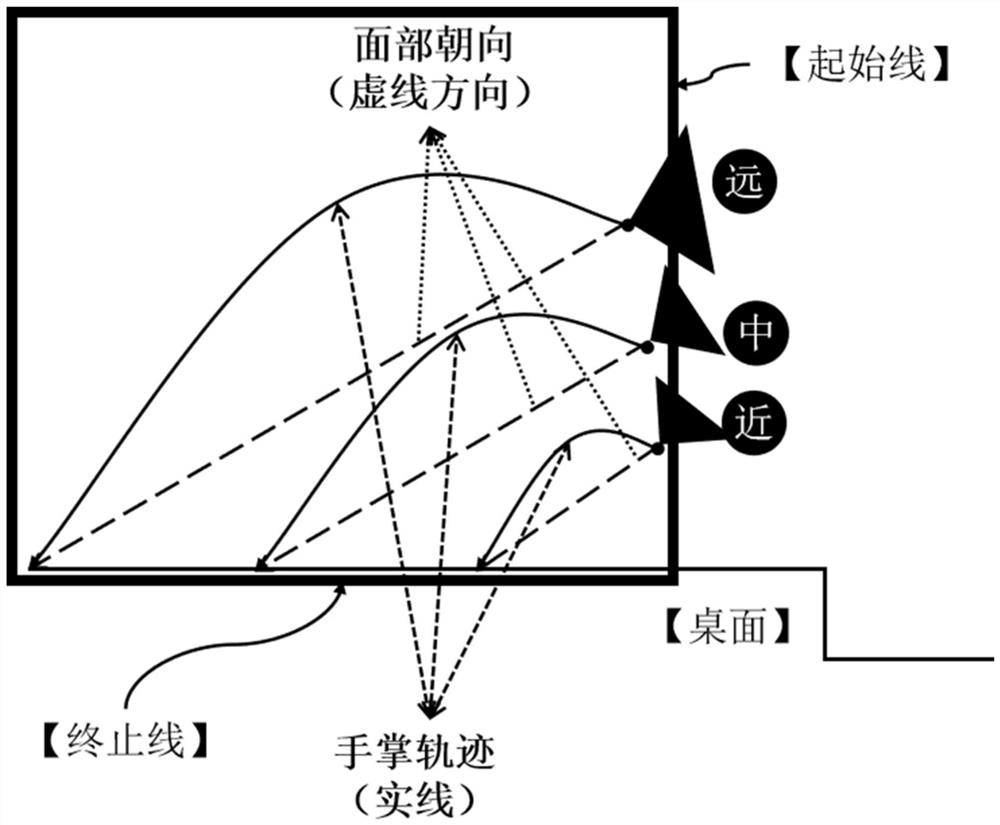
[0030] S2. Input the human face and shoulder key point data into the support vector machine (SVM) to obtain the face orientation modal information; input the palm trajectory data sequence into the Savitzky-Golay filter (SG filter) to eliminate the trajectory data fluctuate to obtain smooth trajectory data;
[0031] S3. Perform parallel fusion of the two modal information to obtain multi-modal fusion information;
[0032] S4. Input into the LSTM (Long Short-Term Memory) network, and output the predicted trajectory of the palm.
[0033] like figure 2 It is a schematic diagram of the position of key points in the metho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More