Displacement sensing device of robot and feedback control method
A sensing device and robot technology, applied in the field of robotics, can solve the problems such as the robot cannot reach the preset position, the position control of the body is not accurate, and the position accuracy of the body is affected, and the connection is free to swing, avoid errors, and have a simple and compact structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
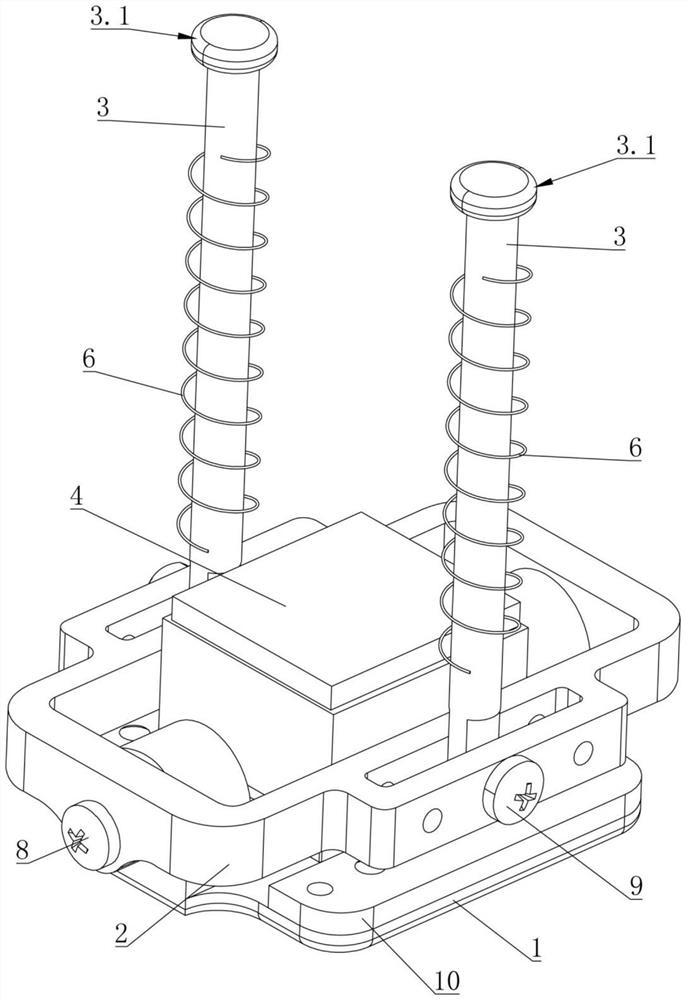
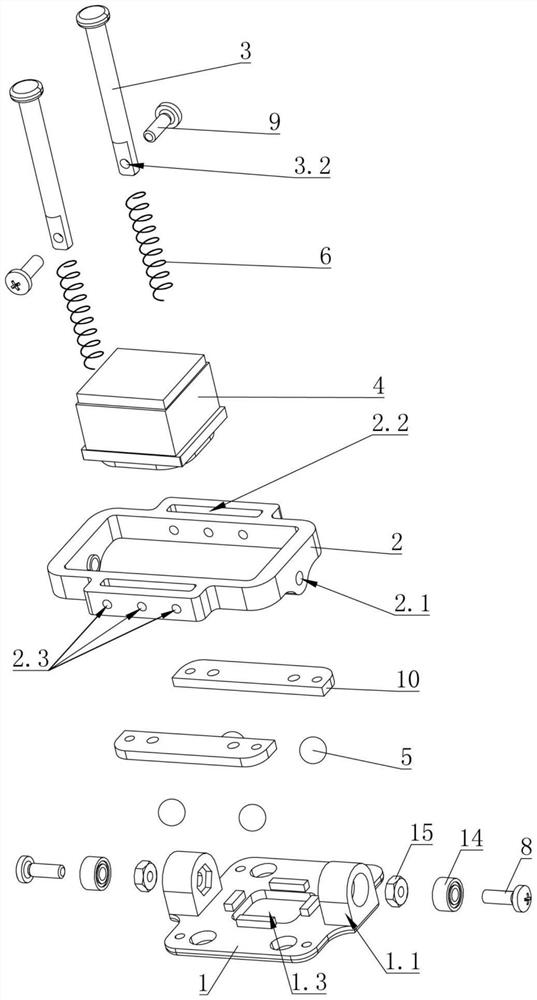
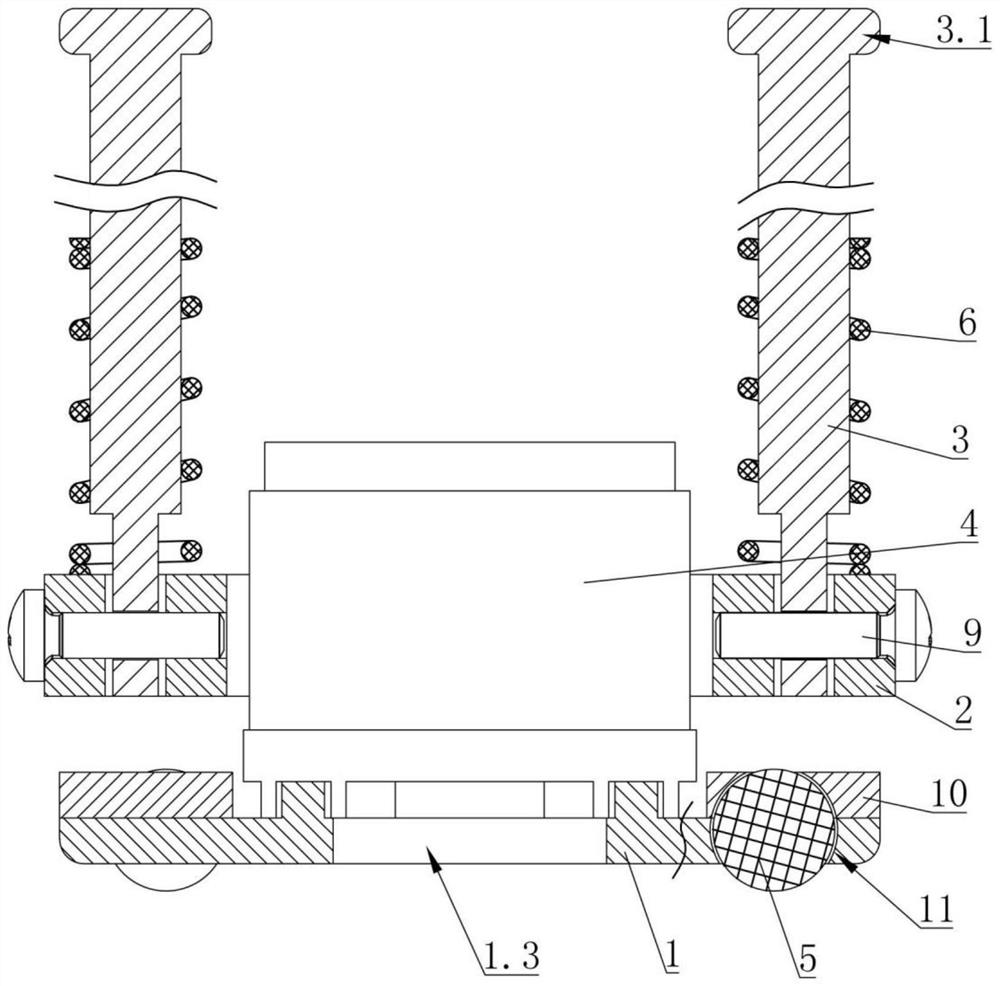
[0033] like Figure 1 to Figure 4As shown, the present embodiment is a displacement sensing device for a robot, including a bottom plate 1, a movable plate 2 and a connecting rod 3, the bottom plate 1 is connected with an optical navigation sensor module 4, and the bottom of the bottom plate 1 is rollingly connected with balls 5; The plate 2 is rotatably connected with the bottom plate 1, one end of the connecting rod 3 is rotatably connected with the movable plate 2, and the other end of the connecting rod 3 is floatingly connected to the body of the robot; The extension directions of the connecting rods 3 are perpendicular to each other.
[0034] The fuselage is provided with a sliding hole, the top of the connecting rod 3 passes through the sliding hole and a limit block 3.1 is protruded, and the limit block 3.1 cooperates with the stopper of the fuselage; a first elastic member is arranged between the fuselage and the movable plate 2 6. The first elastic member 6 always h...
Embodiment 2
[0052] like Figure 5 As shown, compared with the first embodiment, the bottom of the fuselage is provided with a guide rail plate 7, the guide rail plate 7 is provided with a guide sleeve 7.1 corresponding to the sliding hole, and the top end of the connecting rod 3 passes through the guide sleeve 7.1, The limit block 3.1 is matched with the guide sleeve 7.1 to stop. The guide rail plate 7 is firmly connected to the bottom of the fuselage by bolts, and the guide sleeve 7.1 is in clearance fit with the connecting rod 3; the guide sleeve 7.1 can better guide the connecting rod 3, so that the connecting rod 3 can only follow the guide sleeve 7.1. The axial floating, that is, in the vertical direction, can avoid the possibility of tilt, make the movement more stable, and effectively improve the detection accuracy.
Embodiment 3
[0054] like Image 6 and Figure 7 As shown, compared with the first embodiment, the structure of the cover plate 10 in the first embodiment is omitted, the bottom plate 1 is provided with a mounting hole 1.2 for accommodating the ball 5, and the bottom end of the mounting hole 1.2 is provided with a limit ring 12. A second elastic member 13 is arranged in the mounting hole 1.2. The second elastic member 13 always has a tendency to drive the ball 5 against the limiting ring 12 and expose the part of the ball 5 to the outside of the bottom of the bottom plate 1.
[0055] The mounting hole 1.2 can be a blind hole opened in the vertical direction, the limit ring 12 is screwed to the bottom end of the mounting hole 1.2, and the second elastic member 13 is abutted between the bottom of the mounting hole 1.2 and the ball 5, limiting the position The contact surface of the hole 12 and the ball 5 is a matching arc surface, which can better restrain the ball 5, the connection is more ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap