

Tube and wire driving device of vascular intervention surgical robot
A driving device and interventional surgery technology, applied in the field of medical equipment, can solve problems such as difficult control, no obvious and effective solution, and inconvenient installation of long and straight consumables, so as to enhance operability, improve operability, The effect of simplifying the clamping process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to achieve the above objects and effects, the technical means and structures adopted in the present invention will be described in detail with reference to the accompanying drawings with regard to the features and functions of the preferred embodiments of the present invention.
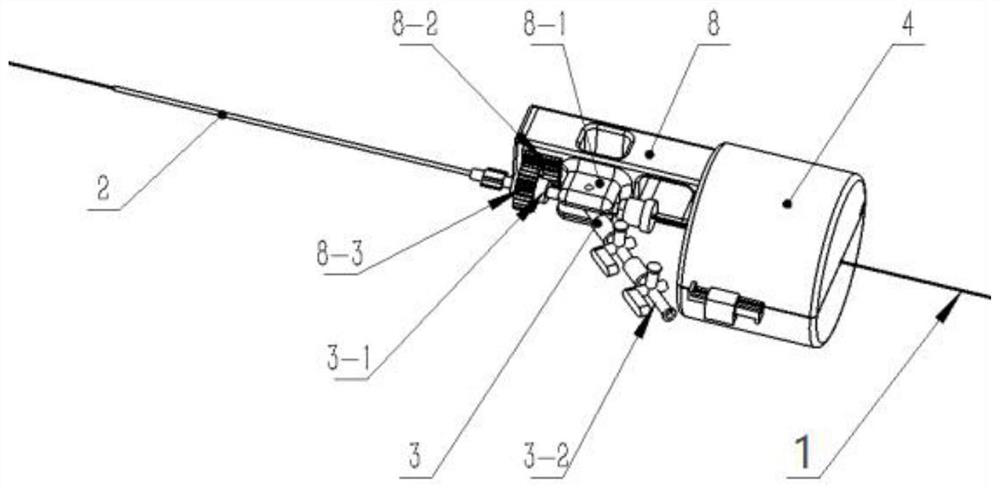
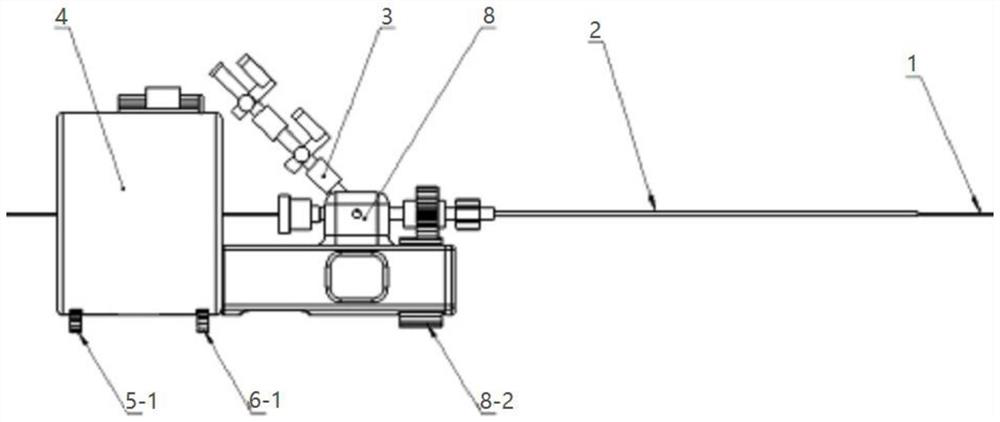
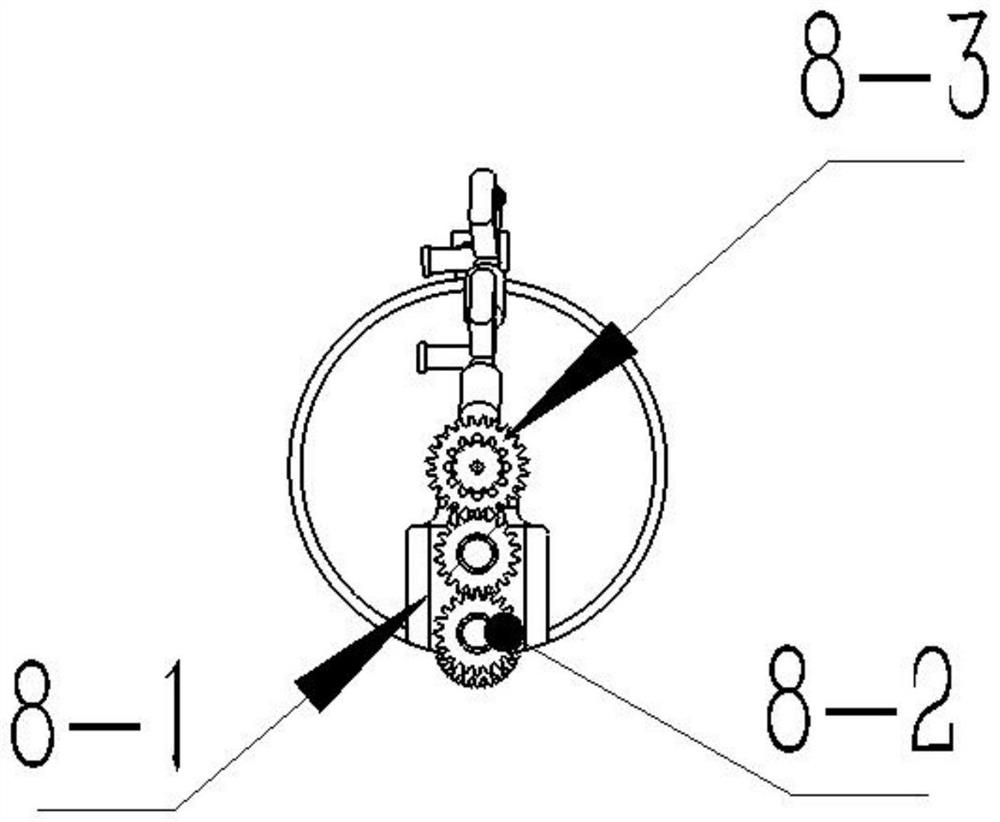
[0039] like Figure 1-10 As shown, the present invention provides a tube and wire driving device for a vascular interventional surgery robot, including a guide wire driving device and a catheter driving device 8, and the catheter driving device 8 is installed on one side of the guiding wire driving device, The guide wire driving device includes a sterile isolation housing 4, a loading support mechanism 7, a rotary motion mechanism 5 and a linear motion mechanism 6; wherein, the loading support mechanism 7, the rotary motion mechanism 5 and the linear motion mechanism 6 are all installed inside the aseptic isolation shell 4;
[0040]The linear running mechanism 6 includes a linear driv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More