

Dynamic vibration prediction and suppression method for large system of mobile milling robot
A robot and large-scale system technology, applied in the direction of instruments, geometric CAD, design optimization/simulation, etc., to improve processing quality and suppress processing vibration problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will now be described in further detail with reference to the accompanying drawings.
[0053] The overall technical solution of this application is:
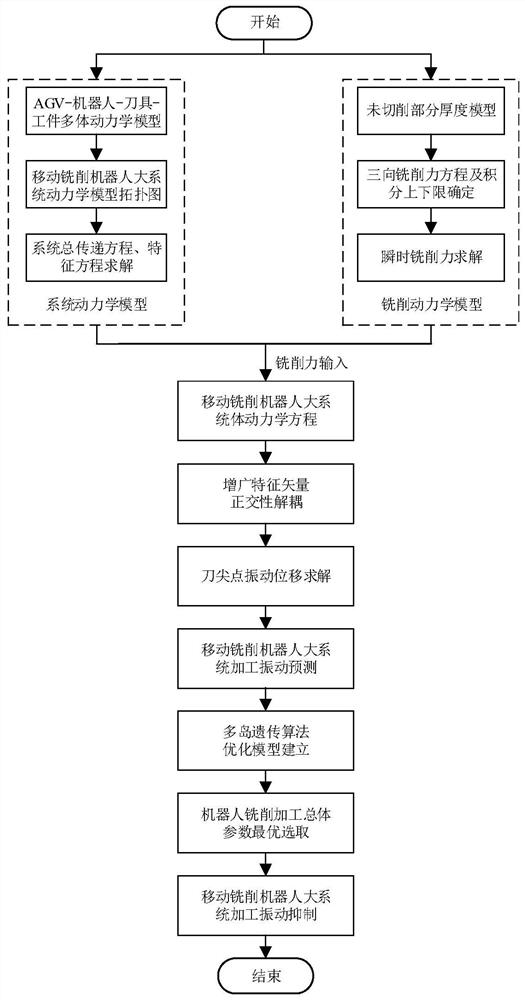
[0054] A method for predicting and suppressing dynamic vibration of a large system of a mobile milling robot, comprising:
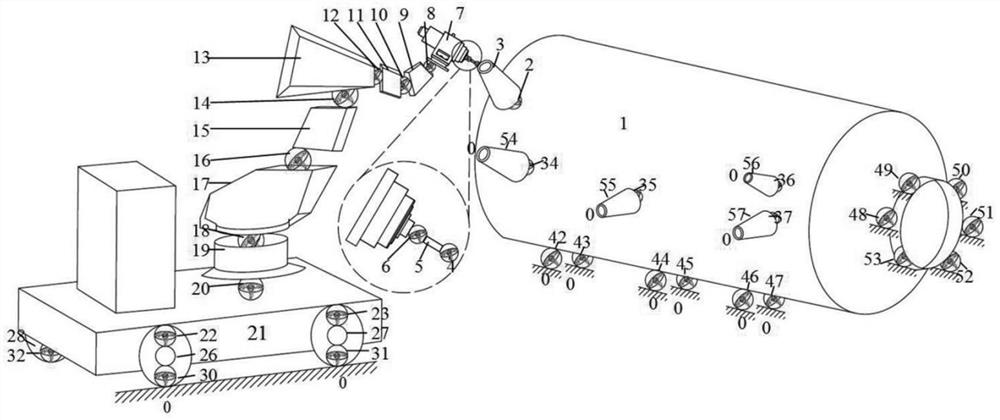
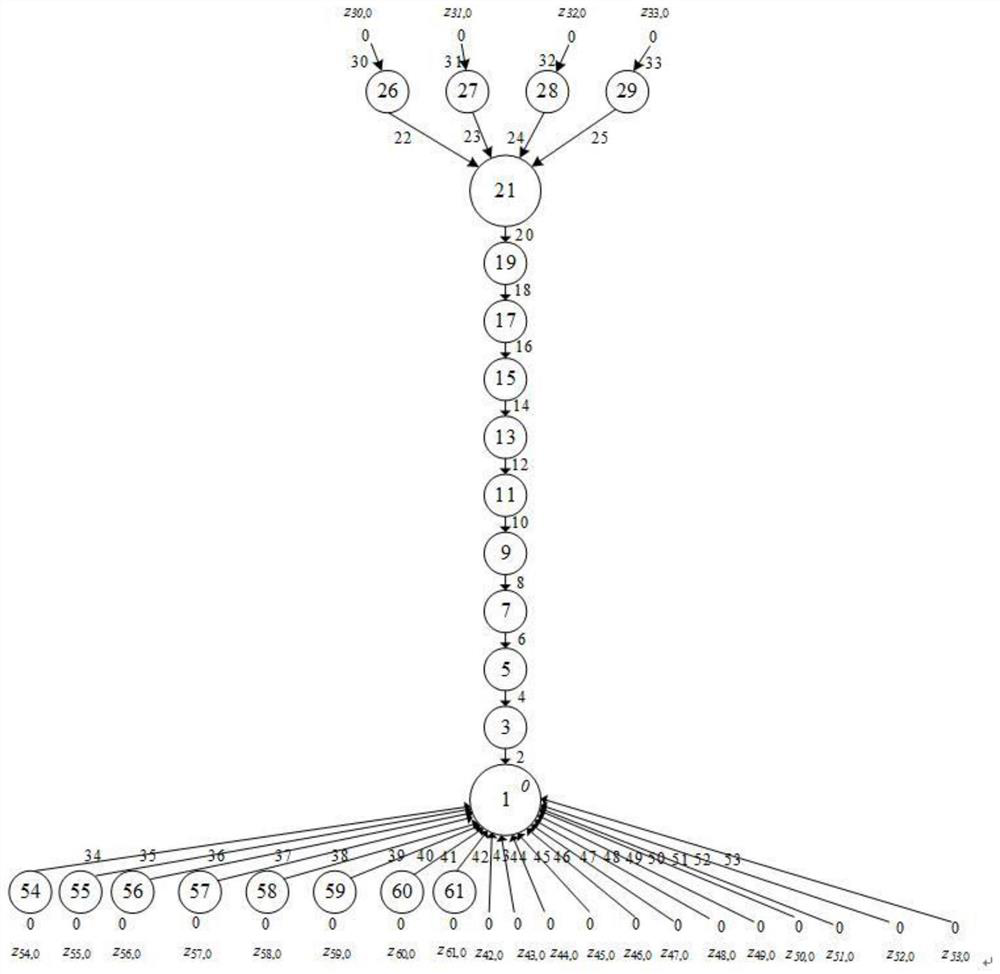
[0055] S1, establish a large system of mobile milling robots, namely AGV-robot-tool-workpiece rigid-flexible coupling multi-body system dynamics model, build a topology diagram of the system dynamics model, and solve the system vibration characteristics;
[0056] S2, establish a robot milling force model;
[0057] S3, establish the dynamic equation of the large system of the mobile milling robot, and predict the vibration response of the robot milling tool tip;
[0058] S4, analyze the dynamic response of the large system of the mobile milling robot, and determine the overall parameters of the system that affect the vibration of the tool tip;
[0059] S5, establish the multi-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More