

Unmanned aerial vehicle modal conversion nonlinear control method, equipment and medium
A nonlinear control and mode conversion technology, applied in the direction of mechanical equipment, adaptive control, general control system, etc., can solve the problems of ignoring time-varying characteristics, failing to faithfully reflect nonlinear dynamic characteristics, etc. Difficulty, improve reliability and range of action, and facilitate engineering design to achieve effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
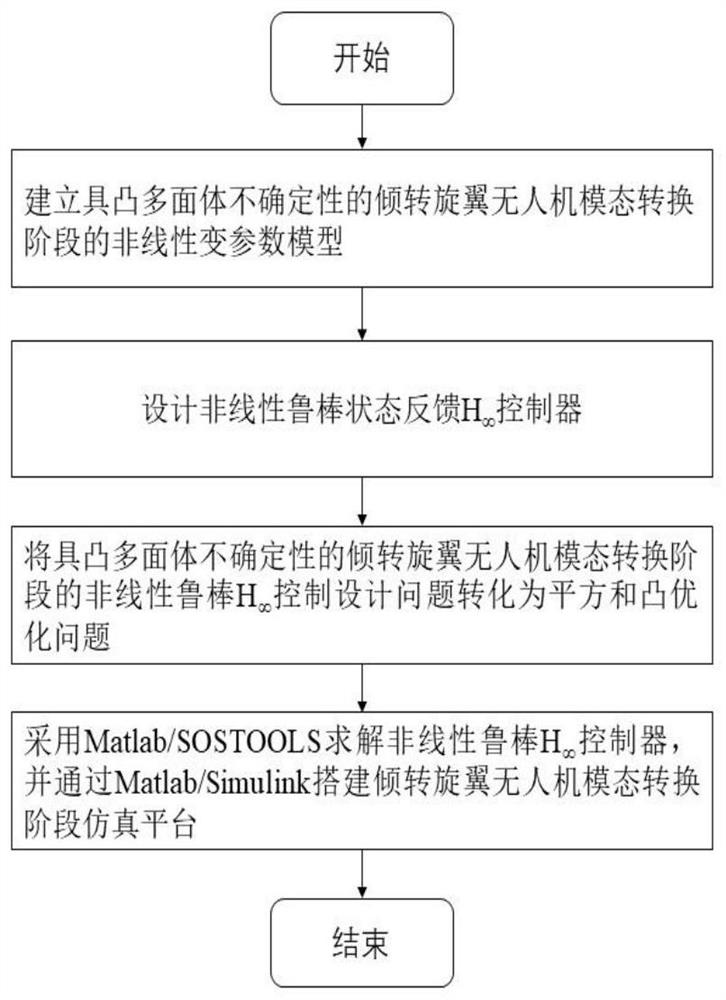
[0055] see figure 1 , a nonlinear control method for modal conversion of unmanned aerial vehicles. Before describing each step, the relevant symbols are specified as follows: R n , R m×n and I represent the set of n-dimensional real vectors, the set of m×n-dimensional real matrices and the identity matrix of appropriate dimensions, respectively; Φ sos represents the set of squares and polynomials; for x ∈ R n , ||x|| represents the 2-norm of x; square matrix A, He(A)=A+A T .
[0056] The method includes the following steps:
[0057] S1, establishing a convex polyhedron uncertainty parameter model; including the following steps: establishing a longitudinal dynamics model of the tilt-rotor UAV; establishing a longitudinal deviation model of the tilt-rotor UAV; converting the deviation model based on external disturbance and parameter perturbation; Based on the assumptions, a parametric model with convex polyhedron uncertainty is established. The details are as follows: In...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More