

Protective clamping device based on automatic control
A transmission device and clamping device technology, applied in the direction of program control manipulators, chucks, manufacturing tools, etc., can solve the problems of impact force workpiece damage, can not stop work immediately, achieve good clamping, reduce losses, and avoid damage Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
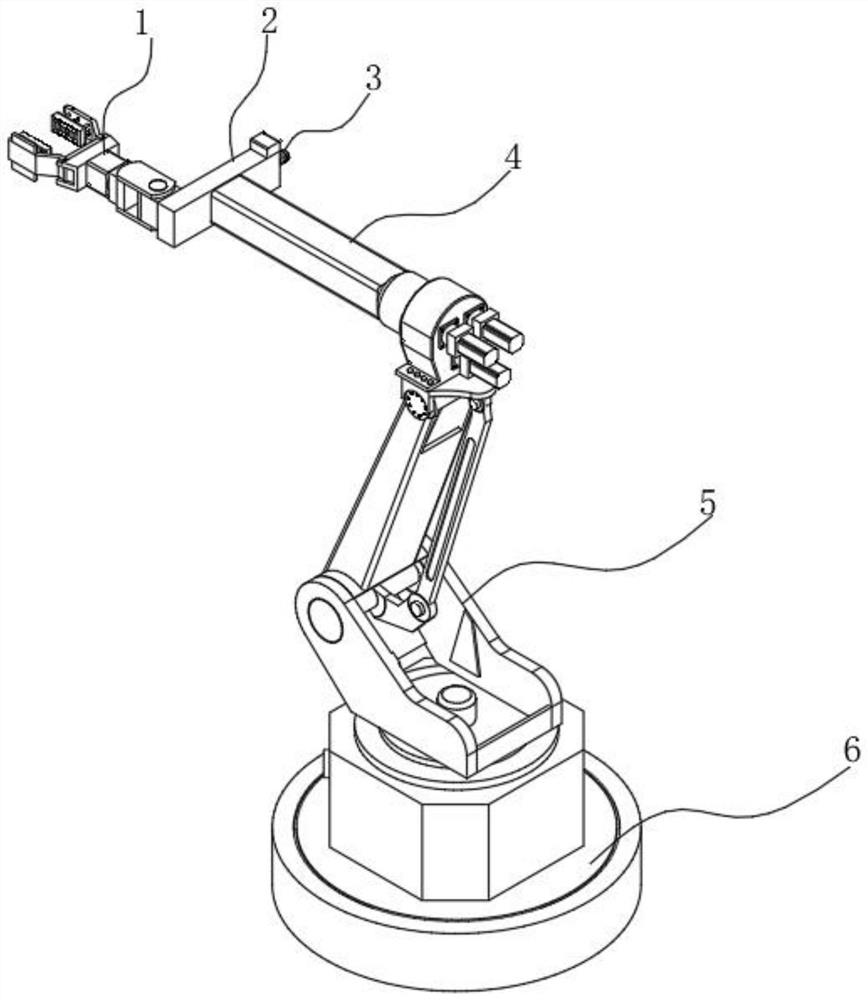
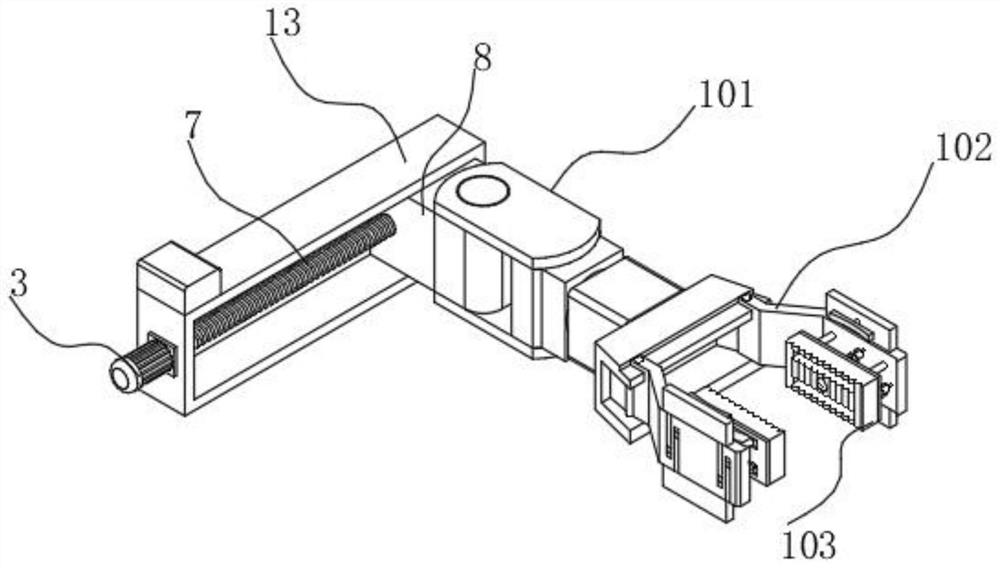
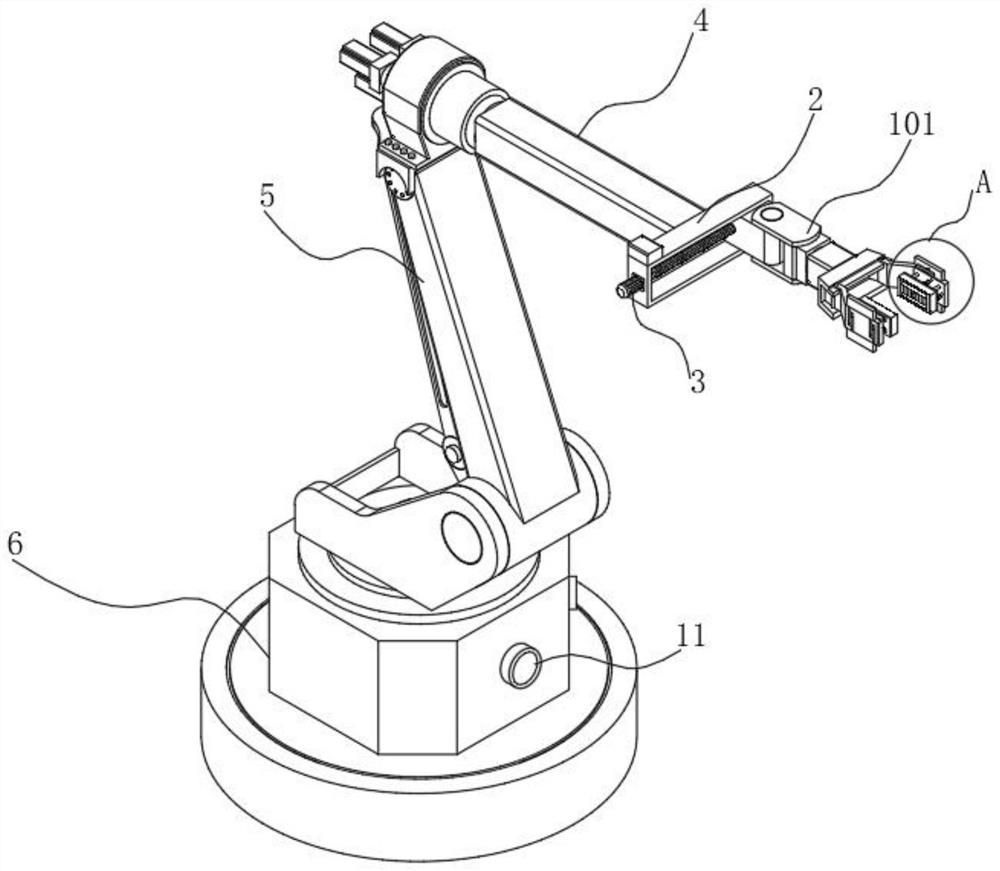
[0031] The present invention provides such as Figure 1-8 A kind of protective type gripping device based on automatic control shown in, comprises base 6, base 6 is provided with central processing unit 9 inside, the top of base 6 is fixedly provided with transmission device 5, and the top of transmission device 5 is provided with rotating device 4, One end of the rotating device 4 away from the transmission device 5 is provided with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More