Dynamic obstacle avoidance method and system for mobile robot and mobile robot
A mobile robot, dynamic obstacle avoidance technology, applied in the field of mobile robots, can solve problems such as large amount of calculation, long obstacle avoidance path, non-conformity, etc., to achieve the effect of easy algorithm, improved safety and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] Embodiment 1 of the present invention proposes a dynamic obstacle avoidance method for a mobile robot. The dynamic obstacle avoidance algorithm based on local sampling uses lidar to detect the surrounding environment of the mobile robot. Reduce the amount of computation during dynamic obstacle avoidance.
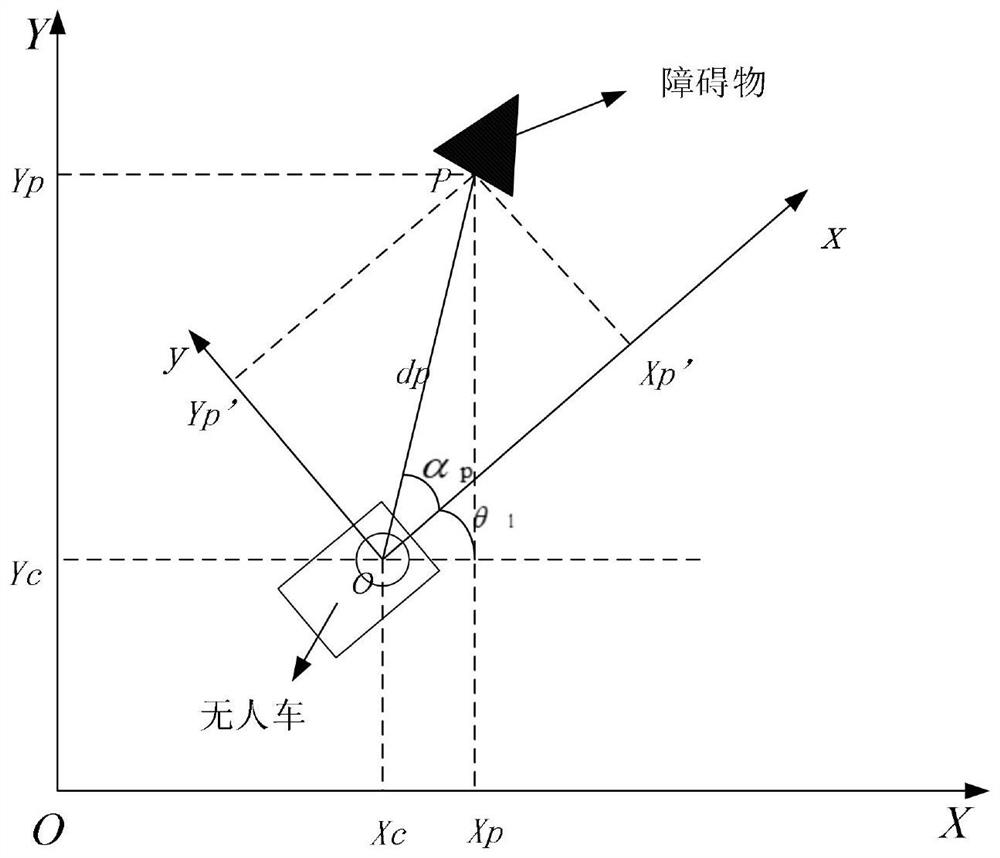
[0052] The invention selects single-line laser radar for environmental perception, and can realize 360° omnidirectional laser ranging scanning within a radius of 25 meters on a two-dimensional plane. Since the position information of obstacles detected by lidar is in the polar coordinate system of lidar, such as figure 1 It is a schematic diagram of coordinate conversion in Embodiment 1 of the present invention. The position information of the obstacle P point detected by the lidar can be expressed as (d p , a p ), and vehicle navigation and positioning are based on the inertial coordinate system XOY, so it is necessary to convert the obstacle position information ...
Embodiment 2
[0094] Based on a dynamic obstacle avoidance method for a mobile robot proposed in Embodiment 1 of the present invention, Embodiment 2 of the present invention also proposes a dynamic obstacle avoidance system for a mobile robot, such as Figure 8 A schematic diagram of a mobile robot dynamic obstacle avoidance system according to Embodiment 2 of the present invention, the system includes a conversion module, a calculation module and an obstacle avoidance module;
[0095]The conversion module is used to obtain the obstacle position information, and convert the obstacle position information in the polar coordinate system to the inertial coordinate system;
[0096] The calculation module is used to calculate the minimum obstacle avoidance distance according to the minimum turning radius of the vehicle in the inertial coordinate system, and then plan the obstacle avoidance path according to the minimum obstacle avoidance distance;
[0097] The obstacle avoidance module is used to...
Embodiment 3
[0118] Based on the dynamic obstacle avoidance method for a mobile robot proposed in Embodiment 1 of the present invention, Embodiment 3 of the present invention also provides a mobile robot, which uses a mobile robot dynamic obstacle avoidance method to avoid obstacles.
[0119] The method includes acquiring the obstacle position information, and converting the obstacle position information in the polar coordinate system to the inertial coordinate system;
[0120] In the inertial coordinate system, the minimum obstacle avoidance distance is calculated according to the minimum turning radius of the vehicle, and then the obstacle avoidance path is planned according to the minimum obstacle avoidance distance;
[0121] According to the current running angle of the vehicle and the obstacle avoidance path, the optimal obstacle avoidance path is selected and converted into the travel angle and speed of the vehicle in the next control cycle to achieve dynamic obstacle avoidance.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More