Highway subgrade settlement detection device
A detection device and roadbed technology, which is applied in the direction of measuring device, electromagnetic measuring device, surveying and navigation, etc., can solve the problems of compaction dead angle, reduce compaction quality, conduit inclination, etc. Substantial quality and high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention; obviously, the described embodiments are only a part of the embodiments of the present invention; rather than all the embodiments. Based on the embodiments of the present invention; all other embodiments obtained by those of ordinary skill in the art without creative work; all belong to the protection scope of the present invention.
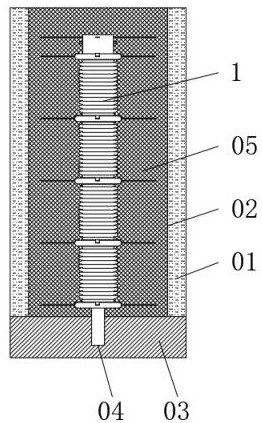
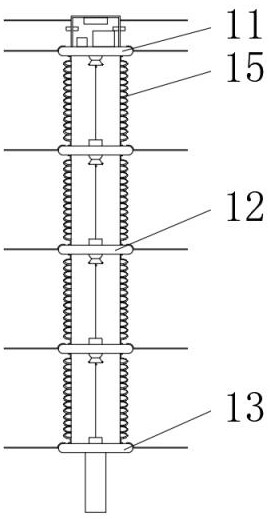
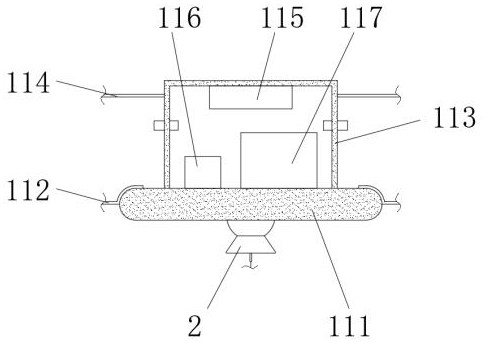
[0041] see Figure 1-13 , a road subgrade settlement detection device, comprising a subgrade main body 01, a fixed borehole 02 is opened on the top surface of the subgrade main body 01, a force-holding soil layer 03 is arranged at the bottom of the roadbed main body 01, and the top surface of the force-holding soil layer 03 is provided A fixed installation hole 04 is opened, and the fixed installation hole 04 shares the central axis with t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



