Row pipe cable robot and control method thereof
A control method and robot technology, applied in the field of robots, can solve the problems of GPS signal failure, sensor positioning error, and inaccurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
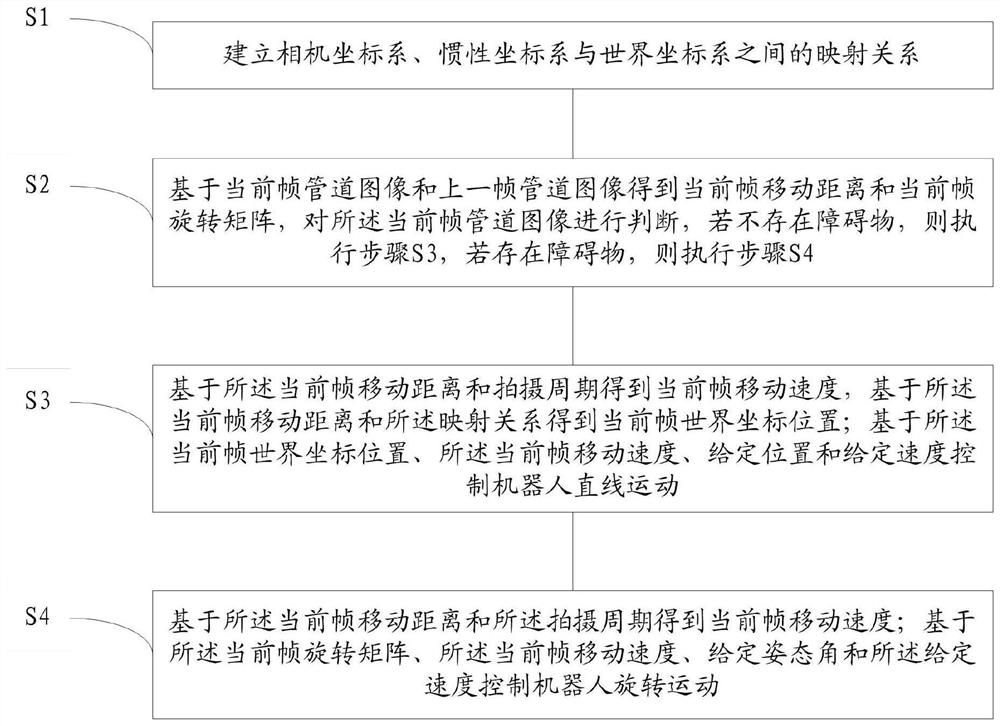
[0055] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
[0056] The purpose of the present invention is to provide a kind of robot and its control method. In terms of perception, it is divided into the perception of robot posture and position, and the control aspect is mainly to control the robot posture and position, and accurately perceive the robot through this method. The position and attitude of the robot can be achieved to achieve high-precision linear and rotational movement of the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More