

Multi-finger hand simulating human hand for robot
A robot and anthropomorphic technology, which is applied in the field of anthropomorphic robots, can solve the problems of large number of device joints and complex control, and achieve the effect of light weight, small volume, and few number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] Content of the present invention is described in detail as follows in conjunction with embodiment and accompanying drawing:
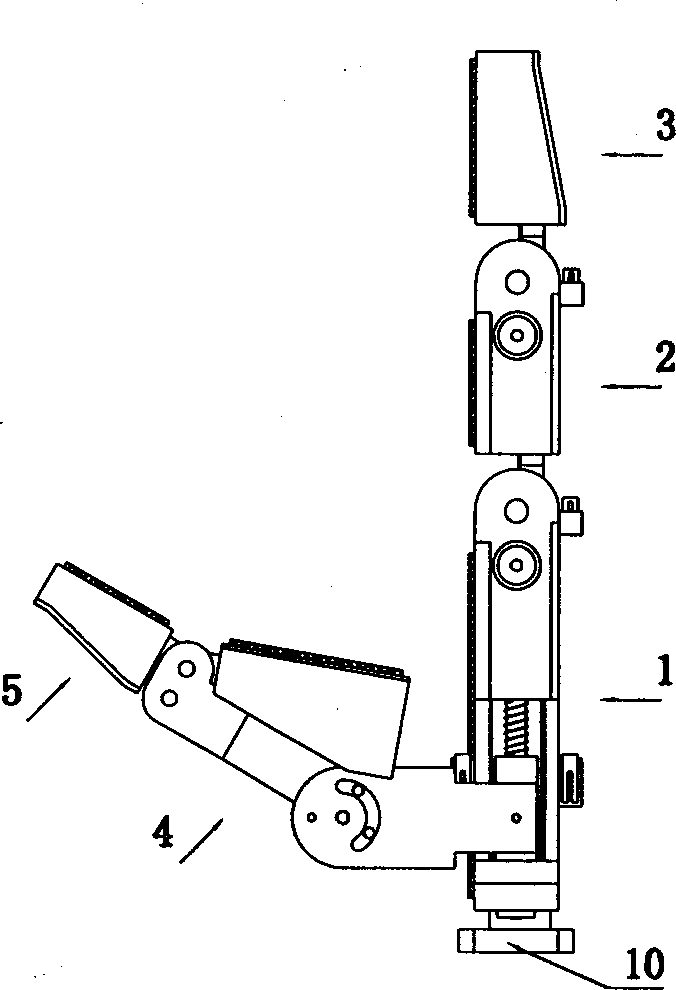
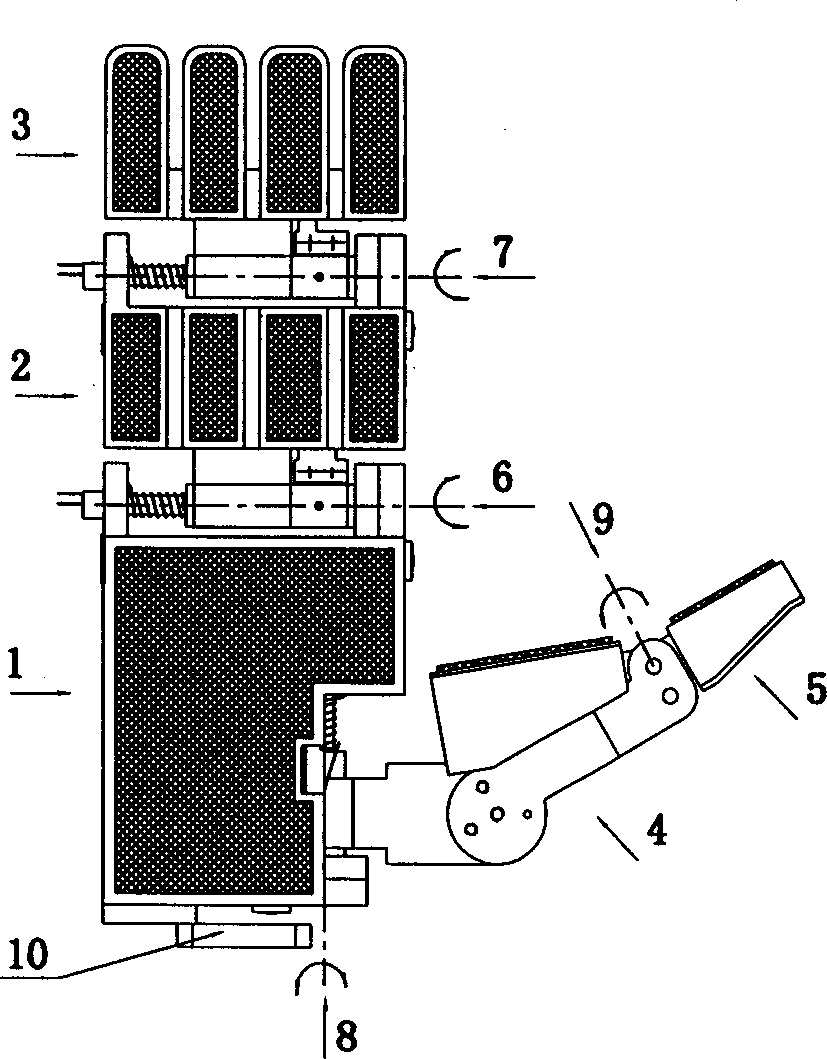
[0073] The appearance of an embodiment of a robot anthropomorphic multi-fingered hand device designed by the present invention is as follows: figure 1 , 2 As shown, it mainly consists of palm 1, index finger first knuckle 2, index finger second knuckle 3, thumb first knuckle 4, thumb second knuckle 5, index finger first knuckle 6, index finger second knuckle 7, thumb second knuckle It consists of 9 parts such as the first joint 8 and the second thumb joint 9 . Among them, the shape of the first knuckle 2 and the second knuckle 3 of the index finger is designed to be similar to the four fingers of the human hand—the index finger, middle finger, ring finger, and little finger. Between the palm 1 and the first knuckle 2 of the index finger, the first knuckle of the index finger is The knuckle 2 and the second knuckle 3 are respectively connected b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More