

Camera calibrating method and its implementing apparatus
A camera calibration and camera technology, which is applied to measurement devices, camera devices, optical devices, etc., can solve problems such as moving out of the field of view, unclear imaging, and inability to achieve automatic calibration, achieving stable and reliable application and improving speed. and the effect of the degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings and examples.
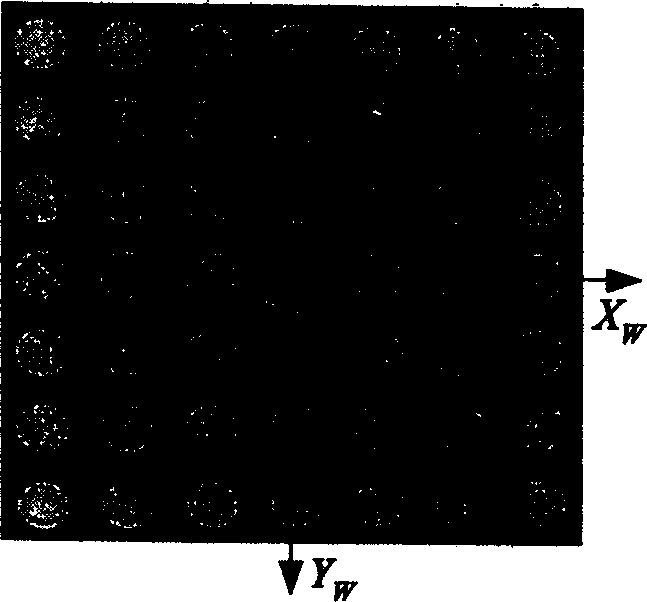
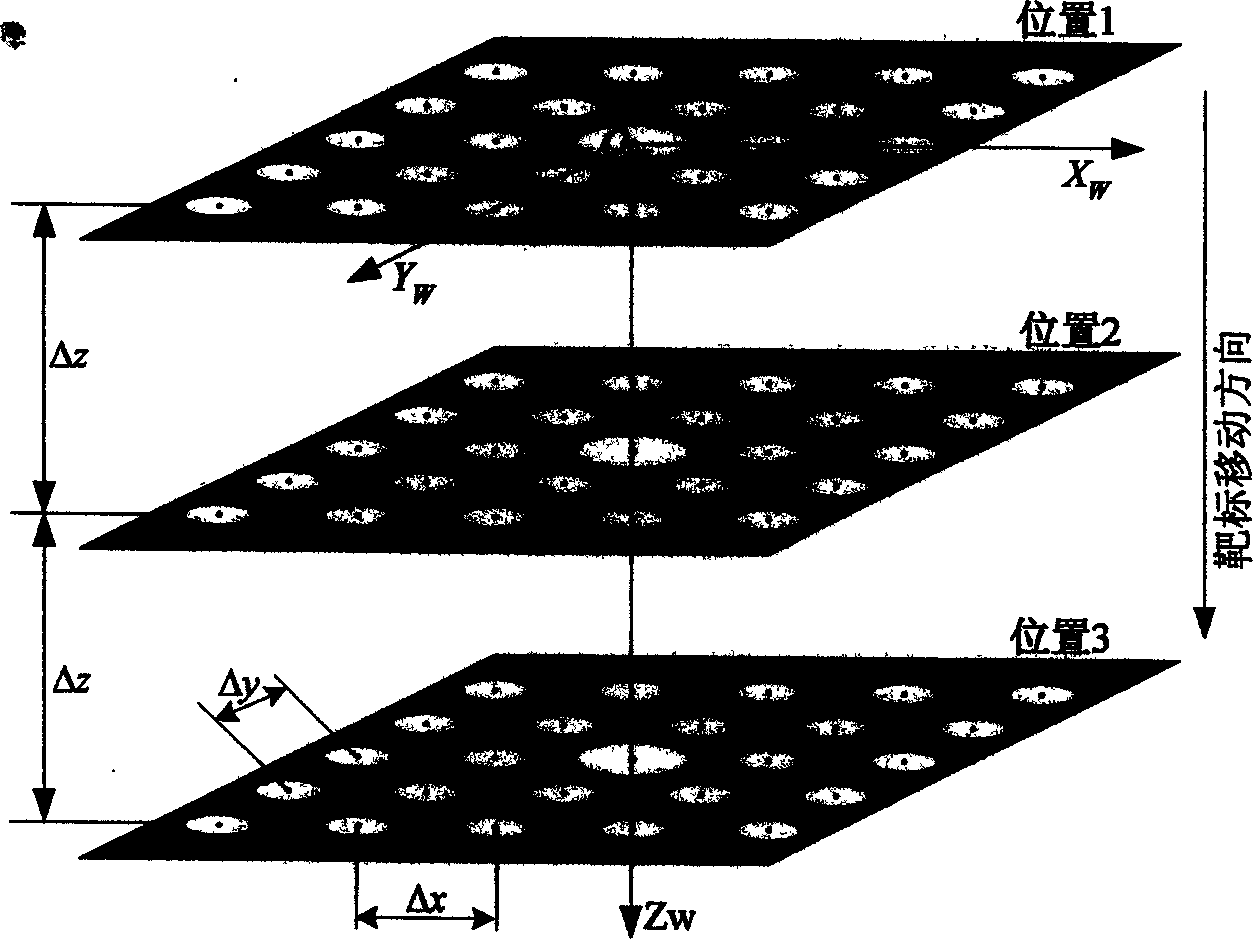
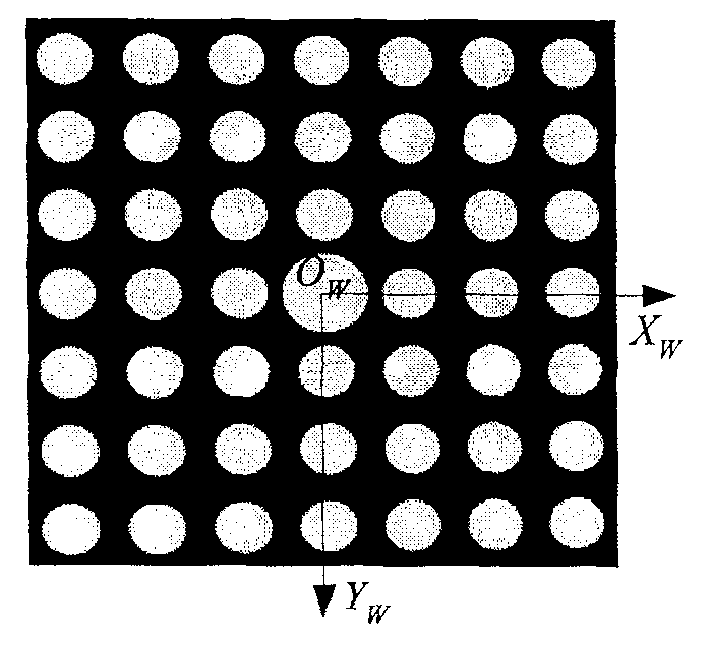
[0015] figure 1 It is a circular target of the present invention, and the circular target is a series of light-transmitting circular hole arrays M×N photoetched on an opaque flat glass, the rows and columns are strictly vertical, and the center-to-center distances of the circular holes are equal and known (Δx, Δy ). The difference from the traditional target is that the radius of the marked hole in the center of the circular target is larger than the rest of the holes. During the calibration process, the center of the marked circular hole at the first position of the circular target is taken as the origin O w , the line where the horizontal center of the circle is located is X w Axis, the line where the longitudinal center of the circle is located is Y w Axis, with the moving direction of the circular target as Z w Axis, establish a space coordinate s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More