

Direct-driving three-freedom serial-parallel mixed precision positioning mechanism
A technology of precise positioning and degrees of freedom, which is applied to the parts and instruments of the instrument, and can solve the problems of long stabilization time, increased motion inertia, unfavorable mechanism motion speed and acceleration, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
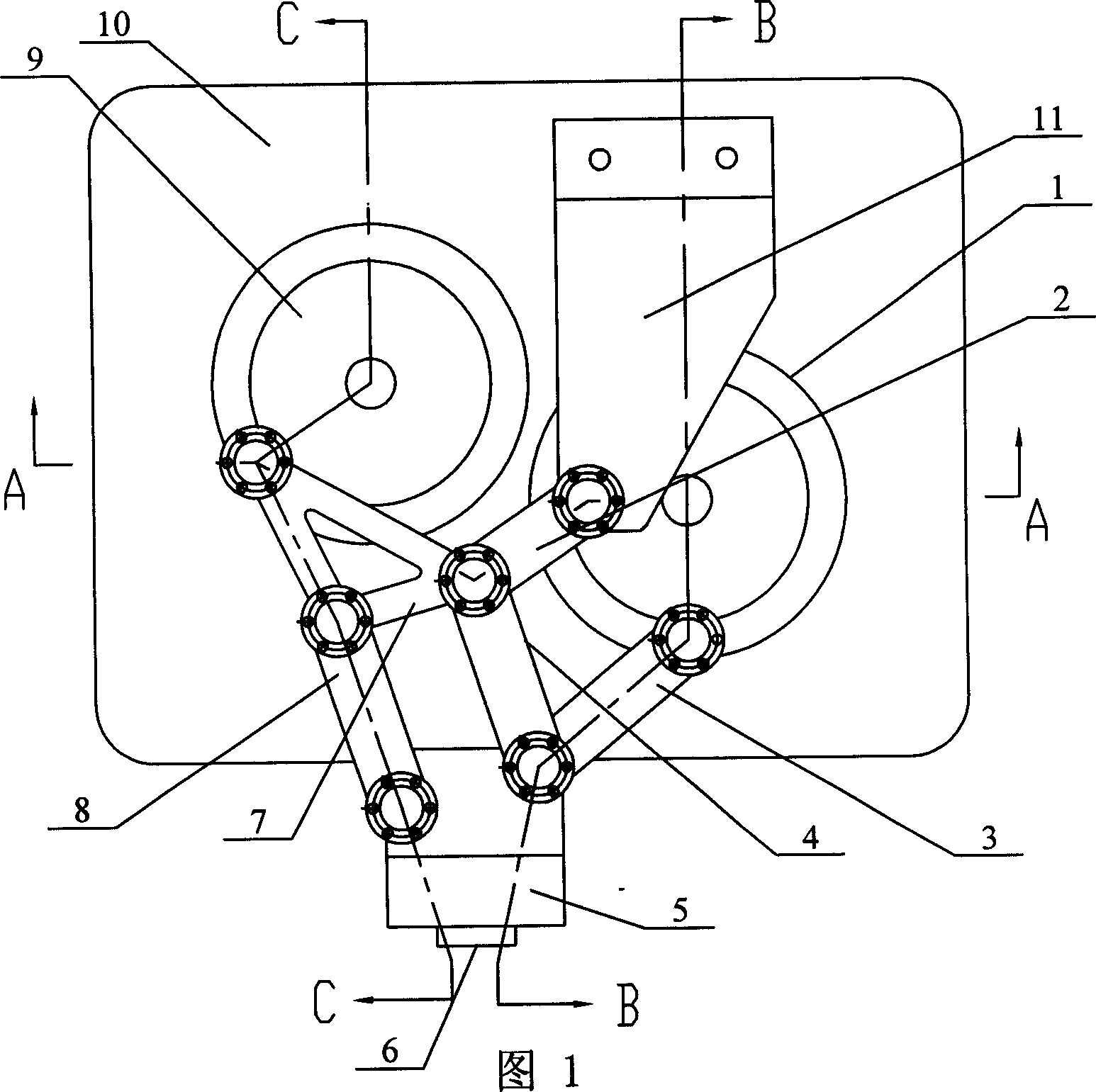
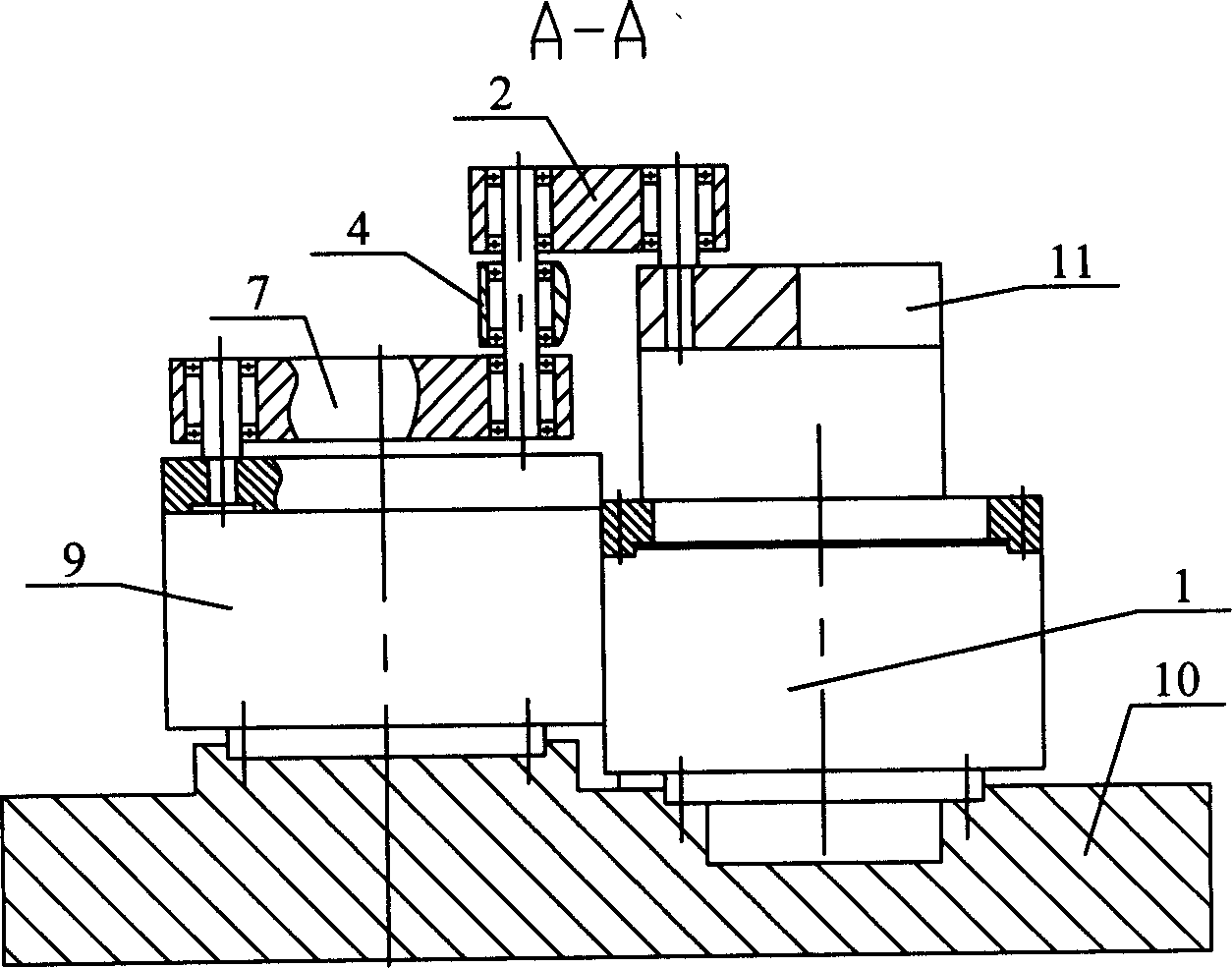
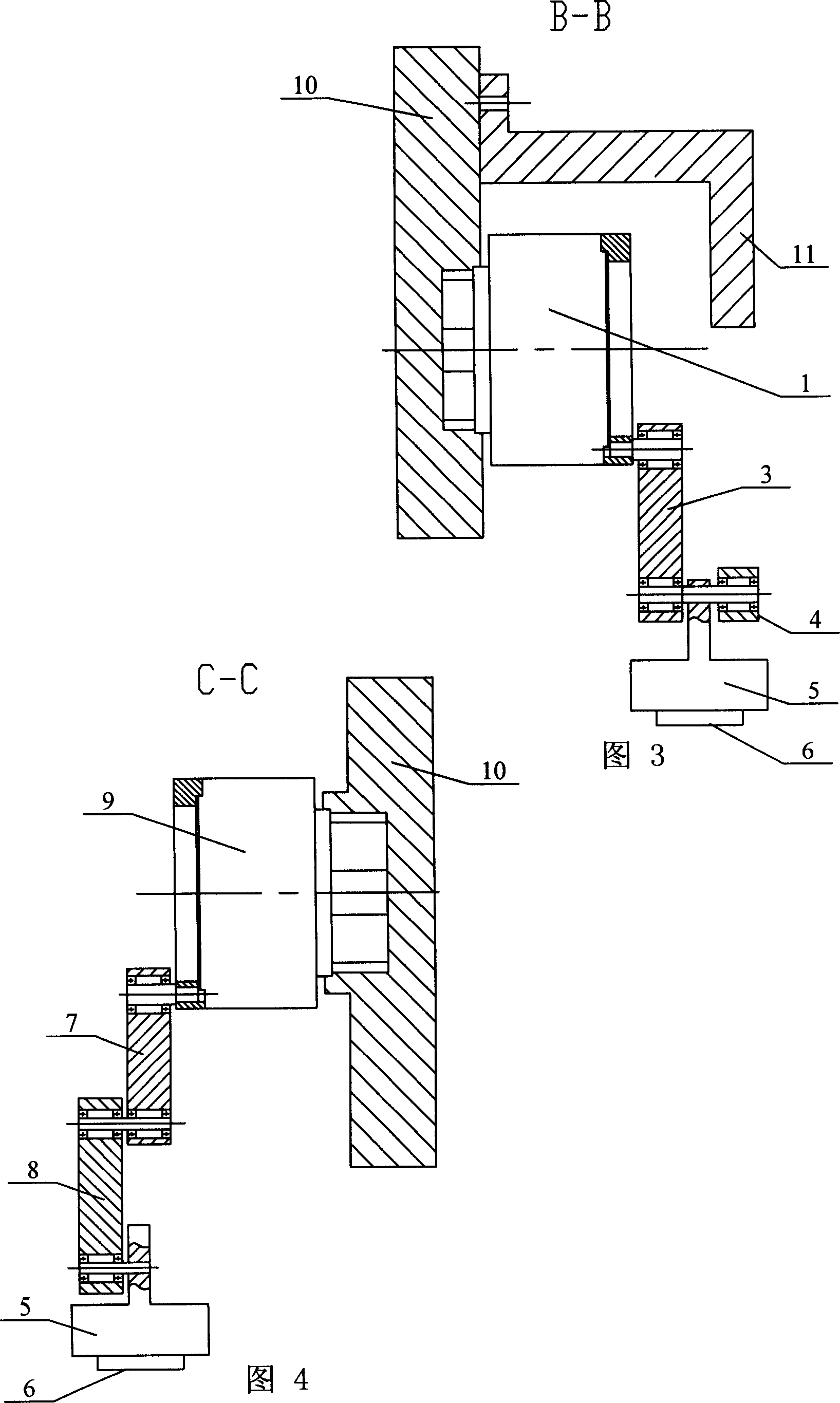
[0005] (see Fig. 1-Fig. 4) present embodiment is made up of No. 1 motor 1, No. 1 connecting rod 2, No. 2 connecting rod 3, No. 3 connecting rod 4, output module 5, linear motion module 6, No. 4 connecting rod 7, The fifth connecting rod 8, the second motor 9, the machine base 10, and the bent plate 11 are composed; the bent plate 11 is fixed on one side of the machine base 10, and the bases of the first motor 1 and the second motor 9 are respectively fixed on the machine base 10 Above, one end of the No. 1 connecting rod 2 is hinged to the curved plate 11, the other end of the No. 1 connecting rod 2 is hinged to one end of the No. 3 connecting rod 4 and No. 4 connecting rod 7, and one end of the No. The output end of No. 1 is hinged, the other end of No. 3 connecting rod 4, the other end of No. 2 connecting rod 3, and the output module 5 are hinged sequentially from top to bottom, and the other end of No. 4 connecting rod 7 is connected to the output end of No. 2 motor 9 Hinge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More