Active intestinal endoscope robot system
An endoscopic robot and active technology, which is applied in electromechanical technology and medical fields, can solve the problems of reduced specifications, large size, and impossibility of magnetization, and achieve long-distance detection, no toxic side effects, and small overall size.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
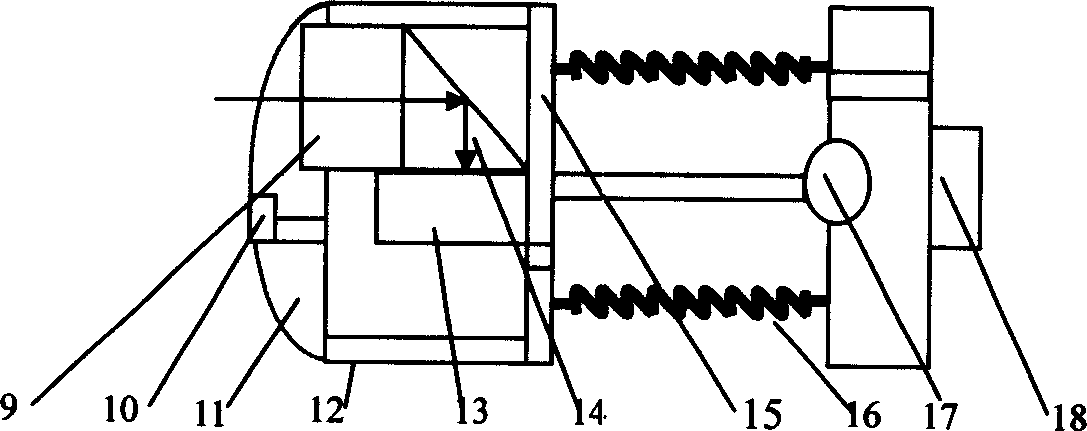
[0028] The overall structure of the robot system of the present invention is as follows: figure 1As shown, it mainly includes: front cabin 1, connecting pin 2, cross universal joint 3, sealing film 4, several linear drives 5, rear cabin 6, controller 7, monitor 8. The front cabin 1 is rigidly connected with the first linear driver 5 through the connecting pin 2 , and the rear end of the last linear driver 5 is connected with the rear cabin 6 through the connecting pin 2 . The linear drives 5 are connected to one another via universal joints 3 . The outside of the whole robot is sealed with an elastic sealing film 4 . The cable is connected to the controller 7 and the monitor 8 by the tail of the back cabin, and is used for controlling the robot and displaying images respectively.
[0029] The structure of front cabin 1 among the present invention is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com