

Controlling system of movable manipulator
A mobile manipulator and control system technology, applied in the field of control systems, can solve the problems of inability to give full play to the performance of the mobile manipulator, difficulty in planning and control of the mobile manipulator, and lack of planning and control, so as to improve the performance, reduce the burden, and expand the scope of work. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
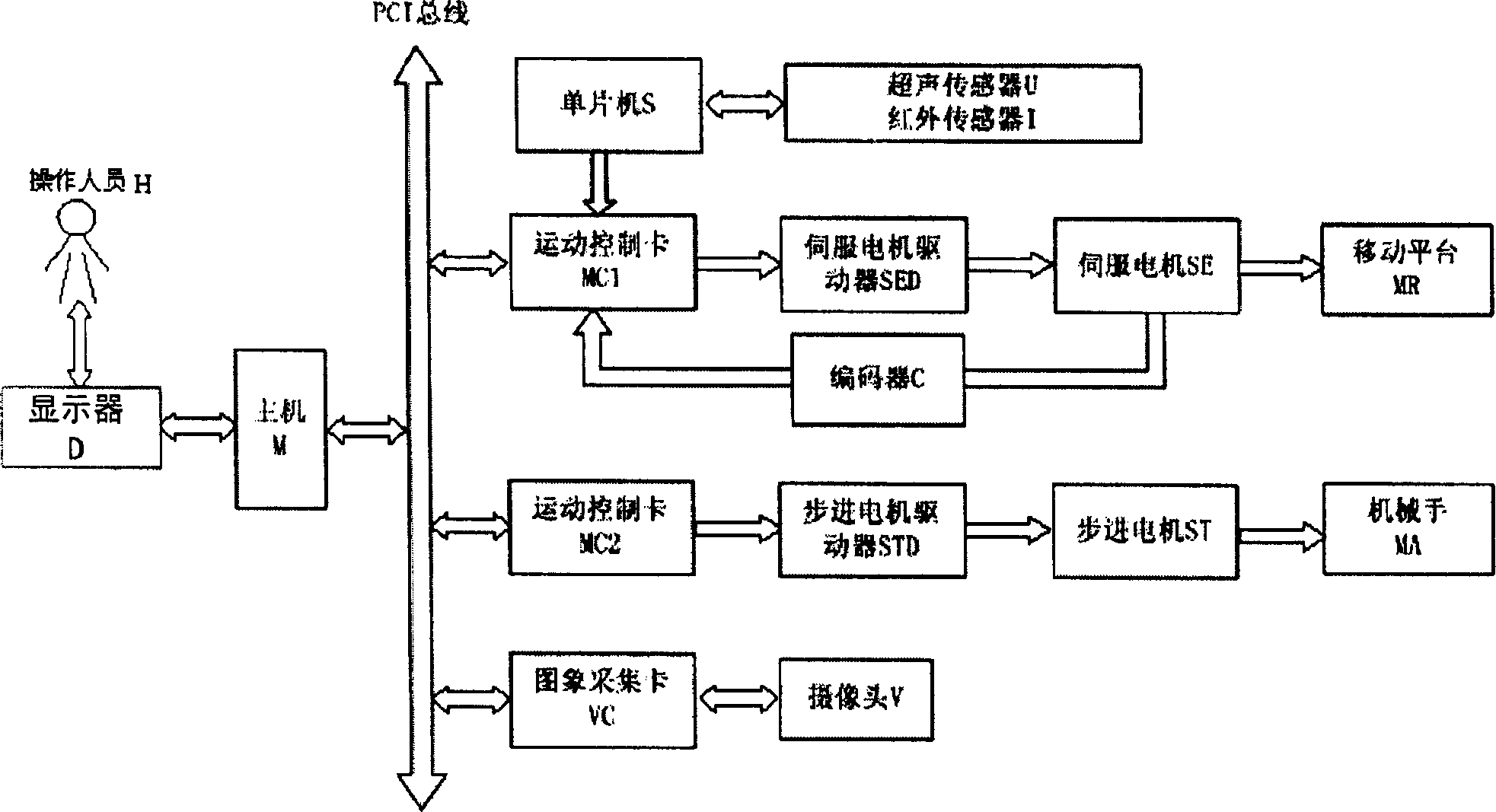
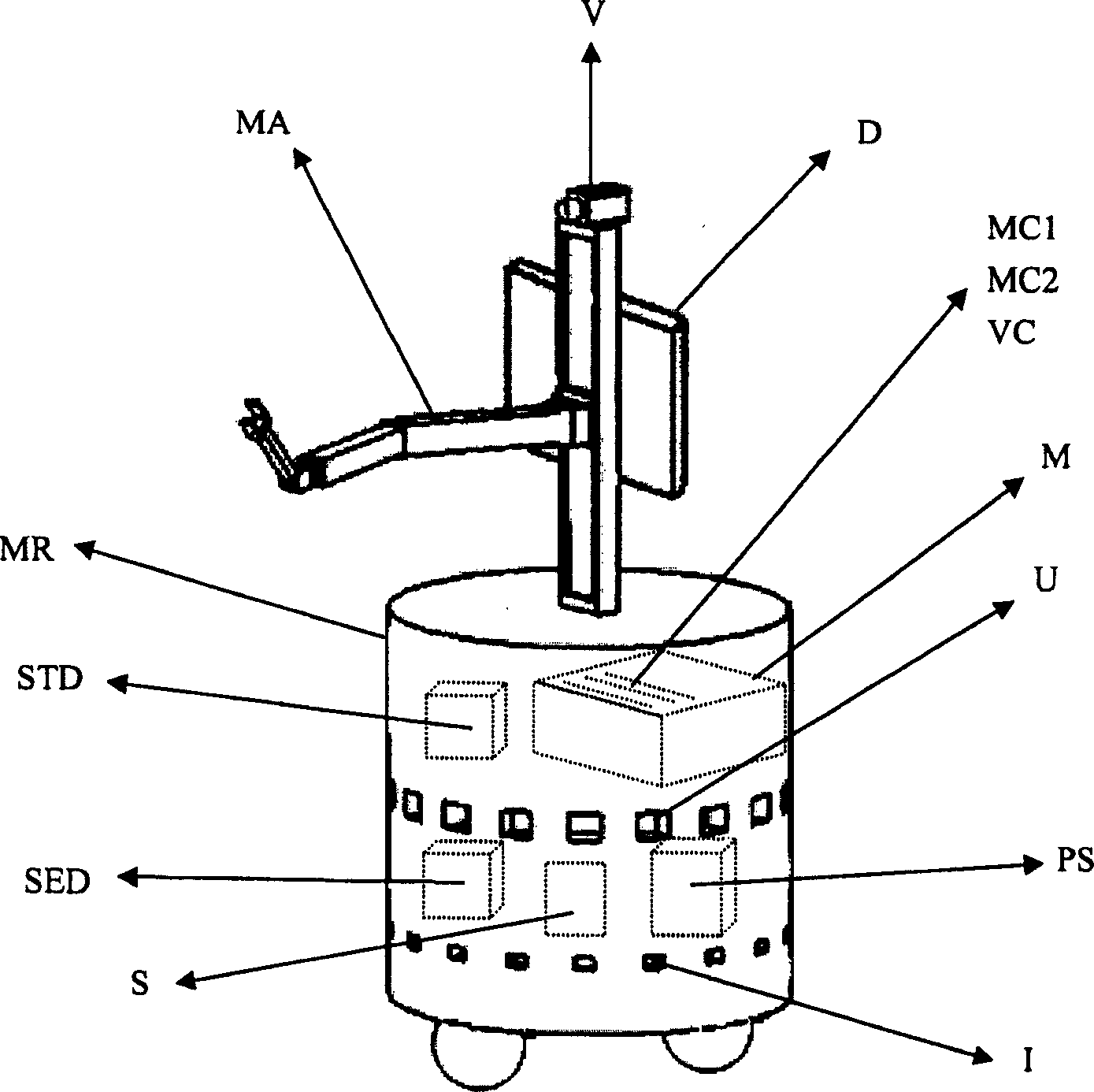
[0040] The mobile manipulator system MM controlled by the mobile manipulator control system of the present invention includes an omnidirectional mobile platform MR and a five-degree-of-freedom manipulator MA. figure 2 It is a three-dimensional physical map, in which the mobile platform MR is a closed volume, and there are three eccentric universal wheels below it, which can complete the three-degree-of-freedom movement of front and rear, left and right, and rotation on the plane. Each wheel is composed of a rolling motor and A steering motor drive. A columnar slide rail is vertically arranged at the center of the top of the mobile platform MR, and a manipulator MA is provided on one side of the columnar slide rail. On the slider on the side of the rail.
[0041] The structure of the control system of the present invention is as figure 1As shown, in addition to the power system PS, the control system also includes a main control computer M, a display D, a single chip S, a se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More